В последние годы радиолюбителям и самодельщикам стали доступны комплектующие, которые применялись ранее в точном приборостроении и военной технике. К таким комплектующим относятся и серводвигатели, о которых рассказано в этой статье.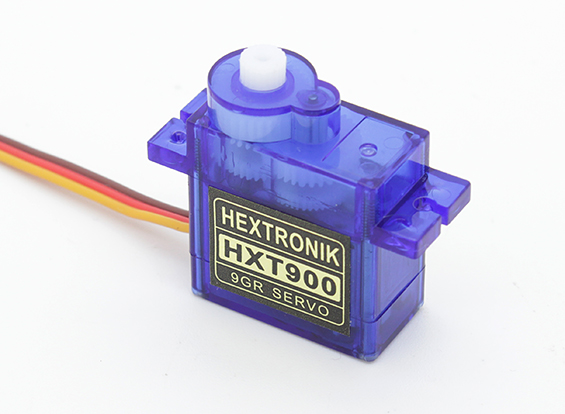 В настоящее время, даже в любительских конструкциях, решение задач по осуществлению управляемого перемещения требующей высоких точностей и динамики невозможно представить без использования различных серводвигателей. Существуют следующие их виды:
В настоящее время, даже в любительских конструкциях, решение задач по осуществлению управляемого перемещения требующей высоких точностей и динамики невозможно представить без использования различных серводвигателей. Существуют следующие их виды:
- асинхронный серводвигатель;
- синхронный серводвигатель;
- серводвигатель постоянного тока;
- синхронный реактивный серводвигатель.
В таких любительских конструкциях, как роботы, вертолеты, дроны, модели автомобилей, кораблей и яхт и т.п. используются, как правило, серводвигатели постоянного тока.
Рассмотрим их подробнее.
Серводвигатели, о которых пойдет речь, называют иногда «удерживающими» серводвигателями. На ось такого серводвигателя надевают качалку, к которой крепят исполнительный механизм (узел) конструкции (робота, вертолета и т.д.). Несколько качалок обычно входят в комплект поставки серводвигателя (фото 1).
 Особенностью «удерживающего» серводвигателя является то, что параметрами управляющего сигнала можно установить и удерживать определенный угол поворота качалки. Максимальное значение этого угла может быть равно 180° или 360°.
Особенностью «удерживающего» серводвигателя является то, что параметрами управляющего сигнала можно установить и удерживать определенный угол поворота качалки. Максимальное значение этого угла может быть равно 180° или 360°.
Внешний вид одного из самых распространенных серводвигателей НХТ900 фирмы HEXTRONIK показан на фото вначале статьи.
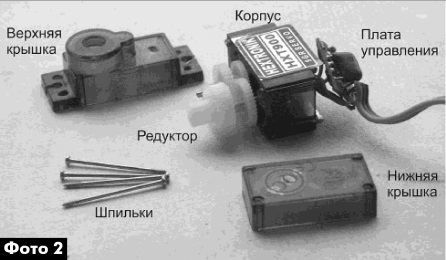
В корпусе серводвигателя находятся:
- электромотор (в нашем случае коллекторный электродвигатель постоянного тока);
- редуктор;
- датчик положения (позиции);
- плата управления.
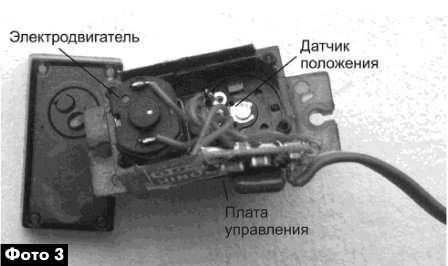
Все это можно разглядеть на фото 2 и фото З, где изображен полуразобранный серводвигатель НХТ900.
Принцип работы серводвигателя
Функциональная схема серводвигателя показана на рис.1.
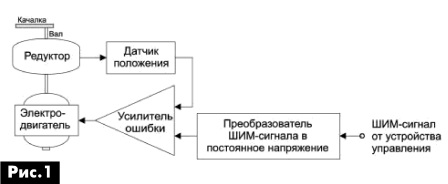 Заметим, что датчик положения (позиции) представляет собой потенциометр, который «насажен» на ось на выходе редуктора.
Заметим, что датчик положения (позиции) представляет собой потенциометр, который «насажен» на ось на выходе редуктора.
На плате управления расположены преобразователь ШИМ-сигнала в постоянное напряжение, усилитель ошибки, а в некоторых серводвигателях и усилитель мощности.
При включении питания включается электромотор серводвигателя и через редуктор происходит вращение, как качалки, так и подвижного контакта потенциометрического датчика положения. При этом на верхнем (по функциональной схеме рис.1) входе усилителя ошибки напряжение будет меняться. На нижнем входе усилителя ошибки будет постоянное напряжение, которое определяется длительностью импульса входного ШИМ-сигнала.
Когда напряжения на входах усилителя ошибки станут равны, напряжение на электромотор подаваться не будет, и качалка замрет в установившемся положении. Если длительность импульсов входного управляющего ШИМ-сигнала изменится, изменится и величина постоянного напряжения на выходе преобразователя, а значит, опять включится электромотор, перемещая качалку и подвижной контакт датчика положения до тех пор, пока напряжение на верхнем входе усилителя ошибки (рис.1) не станет равным напряжению от преобразователя на нижнем входе этого усилителя. Иначе говоря, в плате управления серводвигателя осуществляется обратная связь, которая достаточно точно позволяет позиционировать качалку серводвигателя в зависимости от длительности импульсов управляющего сигнала.
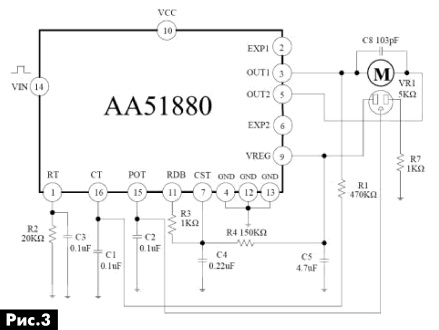
Импульсы управляющего ШИМ-сигнала имеют период повторения 20 мс (частота — 50 Гц). При длительности управляющих импульсов 1 мс угол поворота качалки 0°, при длительности 1,5 мс — 90°, а при длительности 2 мс — 180° (рис.2). Это стандартизированные углы поворота. Линейной зависимости между углом поворота и длительностью импульсов управляющего ШИМ-сигнала нет. Поэтому длительность импульсов при повороте на определенный угол надо корректировать опытным путем.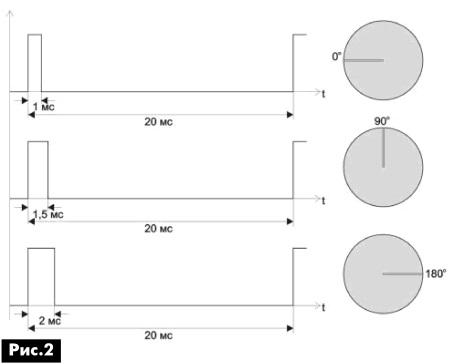 Плата управления большинства серводвигателей выполнена на микросхеме АА51880 в корпусе SSOP16L от компании Agamem Microelectronics Inc.
Плата управления большинства серводвигателей выполнена на микросхеме АА51880 в корпусе SSOP16L от компании Agamem Microelectronics Inc.
Одна из типовых схем включения микросхемы АА51880 показана на рис.3.
 Серводвигатели не самые дешевые компоненты. Их цена зависит от ряда качественных показателей. Один из них — это материал, из которого изготовлены шестерни редуктора. У серводвигателя НХТ900 они пластмассовые, а значит, он не очень надежный. Одним из самых распространенных серводвигателей с металлическими шестернями в редукторе является MG90S компании Tower Pro (фото 4).
Серводвигатели не самые дешевые компоненты. Их цена зависит от ряда качественных показателей. Один из них — это материал, из которого изготовлены шестерни редуктора. У серводвигателя НХТ900 они пластмассовые, а значит, он не очень надежный. Одним из самых распространенных серводвигателей с металлическими шестернями в редукторе является MG90S компании Tower Pro (фото 4). Этот серводвигатель несколько мощнее НХТ900, но и дороже в полтора-два раза. Параметры серводвигателей НХТ900 и MG90S приведены в таблице.
Этот серводвигатель несколько мощнее НХТ900, но и дороже в полтора-два раза. Параметры серводвигателей НХТ900 и MG90S приведены в таблице.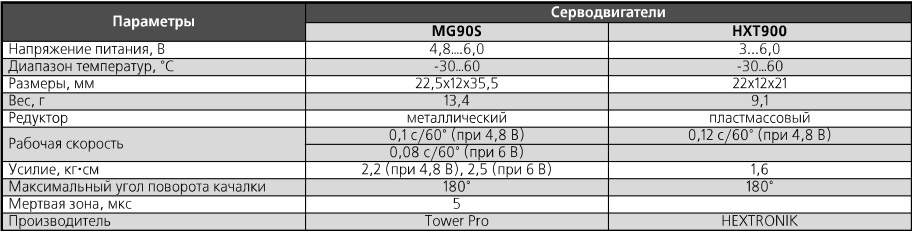 Хочу обратить внимание на параметр, который называется рабочей скоростью (Operating speed). Рабочая скорость измеряется в весьма необычных единицах измерения с/60° (sek/60degree). Этот параметр показывает, за какое среднее время в секундах качалка серводвигателя повернется на 60°. Еще один важный параметр — это усилие (Stall torque). Собственно усилие — это модуль крутящего момента серводвигателя относительно оси редуктора серводвигателя. Измеряется усилие в кг-см, как и момент силы (крутящий момент).
Хочу обратить внимание на параметр, который называется рабочей скоростью (Operating speed). Рабочая скорость измеряется в весьма необычных единицах измерения с/60° (sek/60degree). Этот параметр показывает, за какое среднее время в секундах качалка серводвигателя повернется на 60°. Еще один важный параметр — это усилие (Stall torque). Собственно усилие — это модуль крутящего момента серводвигателя относительно оси редуктора серводвигателя. Измеряется усилие в кг-см, как и момент силы (крутящий момент).
Рабочая скорость и усилие зависят от напряжения питания двигателя, что указано в таблице.
Большинство серводвигателей подключаются к внешним устройствам штатным кабелем длиной до 25 см с 3-контактным разъемом типа JR. К этому разъему подпаяны провода кабеля в последовательности:
- коричневый (черный) — корпус;
- красный — напряжение питания;
- оранжевый — ШИМ-сигнал управления.
Ключа на разъеме серводвигателя нет. Это надо учитывать при подключении его к внешним устройствам.
Автор: Игорь Безверхний, г. Киев
Источник: Радиоаматор №1, 2015
По управлению сервоприводами применил usb-rs485 схема значительно проще получается описание в http://www.shabronov.narod.ru/temp/tenis_bam_v4/