В современных промышленных станках используются цифровые устройства для измерения перемещения механизмов, датчиками которых служат электромеханические устройства, например, ПДФ-3М [1] или ЛИР-158 [2] и аналогичные, использующие двухфазный метод счёта. Предлагаемый прибор предназначен для проверки и отбраковки таких датчиков. Метод проверки — подсчёт числа импульсов на один оборот вала датчика.
В приборе, схема которого изображена на рис. 1, использован микроконтроллер PIC16F628A-I/P и ЖКИ WH1602 или аналогичный с двумя строками по 16 символов и встроенным контроллером. совместимым с HD44780. Две последовательности импульсов датчика, сдвинутых по времени на четверть периода их повторения, что позволяет определить направление движения, подают на входы А и В прибора. На вход R один раз за каждый оборот вала поступает референтный импульс. По нему прибор выводит на ЖКИ результат счёта, а затем обнуляет счётные регистры микроконтроллера, и начинается новый цикл счёта.

Рис. 1
Если датчик исправен, число, выведенное на ЖКИ, должно совпасть с указанным в документации датчика. Счёт происходит только при наличии всех входных сигналов. В противном случае будут выведены нули.
Прибор обрабатывает импульсы стандартных для пятивольтной логики уровней. Максимальная частота их следования — 20 кГц. Она ограничена алгоритмом обработки. Длительность референтного импульса высокого логического уровня должна быть меньше периода следования счётных импульсов. Максимальное число счётных импульсов между двумя референтными импульсами — 99999.
Прибор прост в изготовлении и в налаживании не нуждается. Питают его от гальванической батареи напряжением 9 В. Прибор был испытан с датчиком ЛИР-158-Н-005400-05-ПИ-6, схема соединения которого с прибором показана на рис. 2 Разъём датчика — вилка PC10TB. Его ответная часть — кабельная розетка PC10TB. Датчик потребляет по цепи +5 В около 100 мА, поэтому подключать его к источнику питания прибора нельзя.
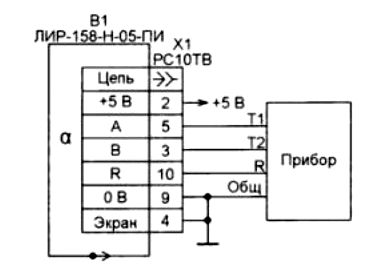
Рис. 2
Скачать программу для микроконтроллера
Литература
- Датчик перемещения дискретный фотоэлектрический типа ПДФ-ЗМ. http://electro.mashinform.ru/sredstva-i-sistemy-avtomaticheskogo-upravleniya-ehlektroprivodami-cifrovye/datchik-peremeshhenija-diskretnyj-fotojelektricheskij-tipa-pdf-3m-obj1733.html (15.03.2018).
- Преобразователи угловых перемещений ЛИР-158. Технические условия ЛИР- 158ТУ. — http://www.rom.by/files/lir-158_tu.pdf (15.03.2018).
Автор: В. ШМАЛЬКО, г. Днепр, Украина