Описанная в чешском радиолюбительском журнале [1] схема позволяет идентифицировать не только изменения яркости объектов на мониторе, но и зафиксировать движение, например, людей или автомобилей в обозреваемом видеокамерой пространстве. По данным первоисточника, чувствительность системы столь высока, что позволяет сделать “отклик” даже на “движение” тени от слабо освещенной руки человека.
Принципиальная схема устройства представлена на рис. 1. Светочувствительными датчиками для нее являются фоторезисторы F1 и F2. Оба фоторезистора прикладывают (приближают) к экрану монитора видеоконтроля, причем первый из них (F1) следит за освещенностью зоны контроля на экране индикатора, а другой (F2) — за освещенностью “эталонного” участка индикатора.

Рис. 1
Операционный усилитель IO1 увеличивает напряжение рассогласования датчиков, а микросхемы IO2 и IO3 являются компараторами напряжения. При этом следует учитывать, что схема не дает отклика на одновременное изменение освещенности обоих датчиков.
При настройке изменением положения движка подстроенного сопротивления P2 добиваются компенсации разброса параметров фотодатчиков F1 и F2, стандартной освещенности контролируемых точек охраняемой зоны и, соответственно, яркости свечения выбранных точек монитора.
Значение сопротивления реостата P1 определяет зону нечувствительности всего устройства контроля — чем меньше действующее сопротивление P1, тем уже эта зона устройства.
Регулировкой подстроенного сопротивления Р3 задают коэффициент усиления ОУ IO1, что определяет чувствительность всего устройства к изменениям яркости свечения контролируемой зоны экрана монитора.
При изменении относительных освещенностей датчиков F1 и F2 начинает светиться светодиод LED1 или LED 2. Это приводит к отпиранию и насыщению транзистора Т1. Потенциал входа TR (вывод 2) микросхемы таймера ІO4 типа NE555CN становится меньше 1/3 Uпит таймера и он переходит в активное состояние. На выходе таймера (вывод 3) появляется высокий потенциал. Составной эмиттерный повторитель на транзисторах Т2, Т3 обеспечивает возможность подачи напряжения питания на активный излучатель “ piezosirenka ”. Читателей следует предупредить, что в данной схеме необходимо использовать только активные излучатели со встроенным генератором НЧ. Пассивные излучатели можно применять в данной схеме только после ее модернизации — введение генератора НЧ.
Питание устройства (см. рис. 1) предполагалось автором [1] от двух источников напряжением ±9 В. Потребление тока от них различно. Если будет использоваться только один источник, что более целесообразно, то его напряжение должно быть 18 В. При этом следует воспользоваться, например, схемой (см. рис. 2) для создания источника питания с искусственной средней точкой.
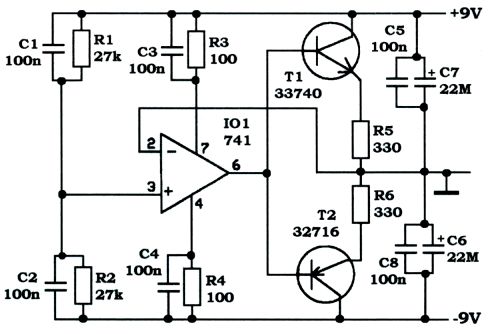
Рис. 2
При настройке устройства (см. рис. 1) первоначально движок потенциометра Р1 устанавливают в положение максимального сопротивления Р1. Регулировкой потенциометра Р2 добиваются примерно нулевого значения напряжения между выводом его движка и “землей” схемы. Светодиоды LED1 и LED2 при этом не должны светиться. Далее производится подстройка сопротивления R5.
В завершение подстройкой Р3 регулируют усиление микросхемы IO1 так, чтобы вся система реагировала только на движение объектов в контролируемой зоне, а подстройкой сопротивления Р1 добиваются отсутствия “сбоев” и ложного включения сигнализации.
Выключателем S1 можно отключать звуковую сигнализацию всего устройства, например, на время настройки или тестирования.
Вышеописанная схема интересна по многим причинам. В частности, у меня она вызвала ностальгию по годам юности и еще раз подтвердила тот факт, что жизнь развивается по спирали. Много лет назад основным посадочным радиолокатором гражданской авиации был ПРЛ-7. Отметка от самолета на его экране была достаточно “жирной”. Диспетчер контролировал ее положение относительно посадочных линий (линий глиссады и курса). Эта линия наносилась фломастером на экран индикатора при контрольном облете посадочного радиолокатора самолетом-лабораторией.
Одновременно при облете на экран ЭЛТ наносились и линии максимально допустимых отклонений борта от “стандартной” посадочной кривой. Положение борта относительно конкретных для каждого аэропорта линий глиссады и курса осуществлялось диспетчером посадки. Все оценки диспетчера субъективны, а его реакция на превышение предельно допустимых отклонений воздушного судна от посадочной прямой инерционна — объективное отклонение на экранах ПРЛ должно быть замечено диспетчером, он должен оценить эту ситуацию и передать по радиосвязи на борт команду экипажу произвести корректировку глиссады планирования и курса или запретить посадку.
Аналогичный контроль параллельно осуществляется и по глиссаде планирования, и по курсу посадки.
Психологическая нагрузка на диспетчера посадки очень велика, ведь от него в значительной степени зависит жизнь людей. Вот и возникла много лет назад идея автоматического сигнализатора превышения допустимых отклонений авиационного судна от посадочных прямых. Один человек — это не коллектив КБ, но идеи “генерировать” может и он. А если может, то и должен — заявка на предполагаемое изобретение была принята ВННИГПЭ и признана изобретением. Теперь читатели смогут понять, почему материалы статьи [1] побудили меня сейчас донести до читателей ее содержание. “Поле” для дальнейшего совершенствования имеется всегда.
Литература
- Pavol Wittner, Citlivy komparator jasu ako detektor osob // Prakticka elektronika-AR. — 2011. №06.S.7-8
Автор: Е. Яковлев