В статье описано несложное устройство, позволяющее организовать поиск приземлившихся моделей ракет и других объектов, оснащённых радиомаяками. В нём использованы готовые радиомодули на частоту 433 МГц. Формирователь модулирующего сигнала радиомаяка выполнен на микроконтроллере ATtiny13A—PU. Приёмник имеет простую направленную антенну и телефонный усилитель от старого привода CD—ROM.
Неожиданно возникшее увлечение изготовлением и запуском моделей ракет по мере улучшения их лётных характеристик столкнулось с проблемой: модели стали настолько высоко и далеко летать, что найти их после приземления стало очень трудно. После потери очередной ракеты мысль оснащать ракеты системой обнаружения стала казаться уже не такой абсурдной, как в начале пути.
Сначала я оснастил очередную ракету звуковым сигнализатором, но посторонний шум (особенно лай собак) практически похоронил надежду отыскать далеко унесённую ветром модель… Возникла мысль использовать принципы радиопеленгации — на модели установить маломощный передатчик (радиомаяк). Для приёма его сигналов сделать приёмник с направленной антенной. С его помощью определять направление на радиомаяк по максимуму принимаемого сигнала. Образец такой системы был описан, например, в [1].
Как правило, радиолюбители, особенно начинающие, создавая высокочастотный радиотракт, испытывают определённые трудности. Поэтому было решено построить его из широко распространённых готовых радиомодулей передатчика и приёмника, применяемых в системах сигнализации и радиоуправления. Пример можно найти в статье [2].
Схема радиомаяка показана на рис. 1. Радиопередатчик U1 — радиомодуль FS1000A, аналогичный применённому в [2]. При подаче на вход DATA модуля напряжения высокого логического уровня включается высокочастотный (433 МГц) генератор модуля и антенна WA1 начинает излучать радиосигнал. Мощность генератора не превышает 10 мВт.
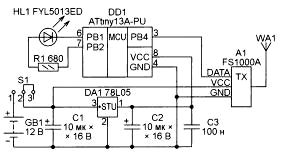
Рис. 1
Микроконтроллер DD1 формирует модулирующий сигнал — пачки прямоугольных импульсов, следующих с частотой около 1000 Гц. Длительность пачек и пауз между ними подобрана так, что при затенённом светодиоде HL1 принятый сигнал воспринимается на слух как «ти-ти-таа» — буква У согласно коду Морзе, а при освещённом светодиоде — как «ти-ти-ти-таа» (буква Ж).
Светодиод HL1 выполняет в маяке сразу две функции: световая сигнализация об идущей передаче и измерение внешней освещённости в паузах между передачами. В последнем случае он работает как фотодиод.
Питают радиомаяк от гальванической батареи GB1 (А23 напряжением 12 В). Роль выключателя питания выполняет съёмная перемычка S1. Когда она установлена в положение 1-2, радиомаяк работает, в положении перемычки 2-3 он выключен. Напряжение питания на передающий модуль А1 поступает непосредственно от батареи, а на микроконтроллер DD1 — через интегральный стабилизатор напряжения DA1.
В одном из вариантов радиомаяка в качестве батареи питания использовался блок из четырёх элементов АА общим напряжением 6 В. Вместо стабилизатора DA1 для гашения излишка напряжения последовательно в плюсовую цепь питания микроконтроллера были включены два кремниевых диода 1N4148.
Алгоритм работы радиомаяка реализован в среде разработки Algorithm Builder for AVR. Программа микроконтроллера в основном цикле своей работы сначала замеряет внешнюю освещённость, а затем формирует пачки импульсов, управляющих передатчиком.
Функция определения освещённости потребовалась для формирования сигнала о срабатывании системы спасения ракеты. После отстрела её головного обтекателя светодиод HL1 оказывается на свету, что меняет характер излучаемого маяком сигнала. Благодаря этому, даже не видя ракеты, по звуку принимаемого радиосигнала можно определить, что головной обтекатель отстрелен, и парашют должен раскрыться.
Для измерения освещённости реализован известный принцип замера длительности разрядки собственной ёмкости светодиода через зависящее от внешней освещённости обратное сопротивление его р-n перехода. Чем выше освещённость, тем меньше обратное сопротивление и длительность.
Измеренное значение программа сравнивает с пороговым (с константой LightMax). В зависимости от результата она формирует в модулирующем сигнале две или три точки.
Конфигурация микроконтроллера должна соответствовать показанной на рис. 2.

Рис. 2
Печатная плата для радиомаяка не разрабатывалась. Монтаж выполнен на макетной плате. Размеры платы 35×20 мм подобраны исходя из необходимости поместить её внутрь обтекателя. На торце платы смонтированы штыри для перемычки S1 и светодиод HL1. Перед установкой микроконтроллера желательно убедиться в наличии напряжения 5 В между гнёздами 4 и 8 его панели. Радиомодуль А1 соединён с основной платой проволочными перемычками. Внешний вид радиомаяка показан на фото рис. 3, он же, помещённый в головной обтекатель модели ракеты, изображён на рис. 4.

Рис. 3
В качестве передающей антенны применён отрезок изолированного провода длиной 17 см (для частоты 433 МГц это четверть длины волны). Необходимо проложить его вдоль корпуса ракеты. При скомканном в обтекателе проводе антенны дальность обнаружения маяка уменьшается в несколько раз.

Рис. 4
Включают радиомаяк непосредственно перед стартом, переставляя перемычку S1 в положение 1-2.
На рис. 5 показан вариант радиомаяка с питанием от четырёх гальванических элементов типоразмера АА. Он был использован для тренировок по поиску радиомаяка на местности, поэтому особых требований к его размерам не было. Плату и батарею питания помещали в стеклянную поллитровую банку, которую прятали в саду, поле, лесу…

Рис. 5
Схема приёмника сигналов радиомаяка изображена на рис. 6. На ней показаны лишь некоторые внутренние элементы модулей приёмника А1 и усилителя для головных телефонов А2, важные для понимания работы устройства. Нумерация этих элементов условна.
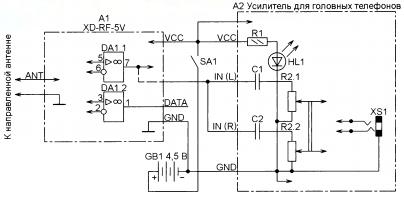
Рис. 6
Как было отмечено выше, в приёмнике в качестве А1 использован готовый модуль XD-RF-5V, описанный в [2]. На выходе DATA этого модуля имеется ОУ DA1.2, включённый по схеме компаратора напряжения. Он превращает продетектированную огибающую принятого радиосигнала в прямоугольные импульсы постоянной амплитуды. Для оценки направления на передатчик по громкости принятого сигнала они непригодны. Поэтому выходной сигнал нужно снять не с компаратора, а с выхода предшествующей ему ступени усиления на ОУ DA1.1, где зависимость амплитуды выходного сигнала от амплитуды принимаемого ещё сохраняется. Необходимое для этого соединение показано на схеме штриховой линией.
В качестве усилителя сигнала для головных телефонов (А2) взята готовая плата от старого компьютерного привода CD-ROM. Кроме собственно усилителя, на этой плате имеются регулятор громкости (сдвоенный переменный резистор R2), гнездо для подключения головных телефонов XS1 и светодиод HL1, который в рассматриваемом случае использован как сигнализатор включения питания.
Питают приёмник от батареи GB1 из трёх гальванических элементов типоразмера ААА общим напряжением 4,5 В. Хотя использованная плата усилителя рассчитана на питание напряжением 12 В, практика показала, что она успешно работает и при пониженном напряжении.
Главная составляющая успеха поиска радиомаяка — направленная приёмная антенна. Её луч должен быть достаточно узким, чтобы определить направление на маяк по максимуму сигнала, но достаточно широким, чтобы при поиске сигнала передатчика, направление на который неизвестно, не пропустить его. Я применил трёхэлементный волновой канал, использованный в [1]. Его размеры показаны на рис. 7. Вибраторы выполнены из медных жил диаметром около 2,5 мм от силового кабеля ВВГ-Пнг (А). Активный вибратор антенны соединён с входной цепью приёмника отрезком плоского двухпроводного кабеля.

Рис. 7
Фотоснимок конструкции — на рис. 8. Вибраторы вставлены в отверстия, просверленные в узких стенках отрезка пластикового электромонтажного короба сечением 40×25 мм и длиной 600 мм. В отверстиях они зафиксированы термоклеем. Платы приёмника и усилителя для головных телефонов закреплены внутри короба винтами М3. Напротив гнезда для головных телефонов, регулятора громкости и светодиода в стенке короба сделаны отверстия подходящего размера. В коробе удачно разместился стандартный батарейный отсек для трёх элементов типоразмера ААА. На стенке короба установлен выключатель питания SA1.

Рис. 8
Для поиска радиомаяка необходимо включить приёмник, установить регулятор громкости на максимум и, поворачивая антенну в горизонтальной плоскости, найти максимум принимаемого сигнала. Далее — двигаться в найденном направлении, периодически корректируя его по максимуму сигнала.
Экспериментально проверено, что дальность обнаружения маяка, лежащего на земле в открытой местности, около 230 м при питании передатчика напряжением 12 В и около 140 м при питании напряжением 6 В. Поэтому при наблюдении за полётом ракеты нужно постараться максимально точно определить визуально направление на место её падения. Иначе придётся прочёсывать большую территорию, пока сигналы маяка не будут обнаружены. Учтите, что значительно уменьшить дальность обнаружения могут сырой лес, мокрая трава или глубокий снег.
Радиопеленгатор получился чрезвычайно простым и недорогим. Он практически не требует налаживания и имеет минимальное число деталей, что позволяет сделать его весьма миниатюрным. Кроме поиска улетевших моделей, устройство можно использовать в иных ситуациях, когда требуется отыскать что- либо на ограниченной территории.
ЛИТЕРАТУРА
- Нечаев И. Поиск радиомаяка в диапазоне 433 МГц. — Радио, 2005, № 8, с. 44—46.
- Пахомов А. Радиоуправляемый сетевой удлинитель. — Радио, 2014, № 7, с. 31 —
Скачать программу микроконтроллера
Автор: А. ПАХОМОВ, г. Владимир
Источник: Радио №10, 2016