В большинстве публикуемых схемных решений для стабилизации частоты вращения вала электродвигателя постоянного тока при изменении нагрузки используется положительная обратная связь (ОС) по току якоря (см., например, статью Гуреева С. «Устройство питания сверлилки» в «Радио», 2011, № 5, с. 33). В промышленных электроприводах, как правило, используется обеспечивающая высокую стабильность отрицательная ОС по частоте вращения. Проще всего её реализовать с помощью тахогенератора. Известен ещё один способ получения сигнала, пропорционального частоте вращения, который практически не используется радиолюбителями, — это выделение напряжения противоЭДС якоря. Он основан на том, что противоЭДС якоря при постоянном потоке возбуждения пропорциональна частоте вращения якоря.
Схемное решение способа получения этого сигнала изображено на рис. 1.

Рис. 1
Электродвигатель постоянного тока здесь изображён в виде последовательной цепи, состоящей из источника противоЭДС Е и из символизирующего обмотку якоря резистора Rя. Последовательно с электродвигателем включён резистор RЗ. Если выполняется условие:
RЗ/Rя = R2/R1 = k, (1)
то можно записать следующие уравнения:
U = Е + IRя(1+k);
u1 = Еk/(k+1)+IRяk;
u2=IRяk,
где Е, I и Rя— соответственно противоЭДС, ток и активное сопротивление якоря. Тогда напряжение между точками 1 и 2 равно u1-u2 = Еk/(k+1), т. е. пропорционально противоЭДС и не зависит от тока якоря. Это напряжение можно использовать в качестве напряжения ОС. Для электродвигателей постоянного тока с напряжением питания 24 В значение коэффициента к целесообразно выбрать в пределах от 0,05 до 0,2. Для двигателей с более высоким напряжением питания оно может быть меньше.
Схема возможного варианта регулятора частоты вращения электродвигателя, в котором использован описанный способ регулирования, показана на рис. 2. Транзистор VТ1 работает в режиме микротоков. Функцию регулятора тока якоря выполняет канал полевого транзистора VТ2. Переменным резистором R3 устанавливают частоту вращения двигателя, подстроечным резистором R7 добиваются выполнения условия (1), а подбором R2 изменяют интервал регулирования.
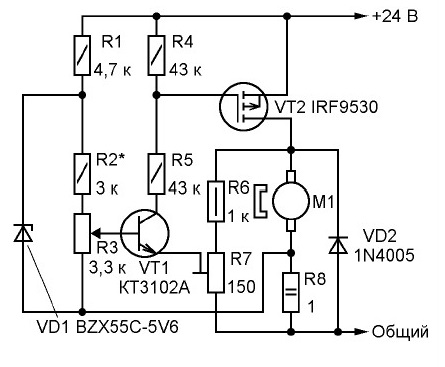
Рис. 2
Устройство обеспечивает хорошую стабильность частоты вращения двигателя при изменении нагрузки на его валу в широких пределах. Указанный на схеме номинал резистора R8 рассчитан на применение электродвигателя Д-5М (сопротивление обмотки якоря — приблизительно 14 0м). Транзистор VТ2 размещают на теплоотводе.
К недостаткам регулятора можно отнести зависимость коэффициента к от температуры: при нагреве якоря его сопротивление изменяется, а это вызывает нарушение условия (1). Для уменьшения влияния этого фактора можно резистор намотать медным проводом подходящего сечения и обеспечить его тепловой контакт с корпусом двигателя.
При необходимости построения более сложных устройств управления можно выделить сигнал, пропорциональный противоЭДС, с помощью операционного усилителя, например LМ358, в дифференциальном включении.
Автор: А. ЗЫКОВ, г. Йошкар-Ола, Республика Марий Эл