 Широкое распространение бытовых устройств оснащенных импульсным источником питания приводит к заметному увеличению доли реактивной мощности в полной мощности питающей сети.
Широкое распространение бытовых устройств оснащенных импульсным источником питания приводит к заметному увеличению доли реактивной мощности в полной мощности питающей сети.
Рост реактивной мощности значительно увеличивает нагрузку на генерирующие и распределительные устройства и на соединительные электрические кабеля. Для преодоления этого недостатка предлагаются устройства повышающие коэффициент мощности импульсного источника питания.
Что такое коэффициент мощности?
Коэффициент мощности (КМ) определяется как отношение между активной (полезной) и полной (активной и реактивной) мощностью потребляемой нагрузкой, которая, например, питается от преобразователя напряжения (ИИП). Значение полезной мощности вычисляется как произведение тока и напряжения на косинус угла между ними. Полная мощность определяется перемножением среднеквадратичных величин. Таким образом, коэффициент мощности:
PF=P/Vrms·Irms,
где Р — полезная мощность.
Для двух синусоидальных сигналов с одинаковой частотой КМ может быть определен через косинус угла между сигналами тока и напряжения:
РР=cosφ
Значение КМ теоретически может изменяться от менее чем 1 % до 100%, в зависимости от соотношения между активной и реактивной мощностями. При этом КМ может быть опережающим (при емкостном характере нагрузки), или отстающим (при индуктивном характере нагрузки).
Таким образом, задачей корректора КМ является сведение к нулю сдвига фаз между током и напряжением или, иными словами, нейтрализация емкостной и индуктивной составляющих нагрузки преобразователя напряжения.
Результатом активной коррекции КМ является следование кривой входного тока ИП входному питающему напряжению. При этом, возможно получить КМ порядка 99,9%. ИП с высоким КМ позволяют снизить энергопотребление, а точнее говоря, более рационально использовать внешние энергоресурсы.
Кроме того, использование микросхем коррекции КМ в импульсном источнике питания дает экономию на:
- использовании входных фильтрующих конденсаторов меньшей емкости;
- более простой конструкции трансформатора;
- меньших потерях на переключающем транзисторе;
- уменьшении размера печатной платы.
Активная мощность (Ватты) производит реальную работу. Это компонент передачи энергии (по аналогии превращения электроэнергии в обороты двигателя).
Реактивная мощность — это мощность, требующаяся для создания магнитных полей (потерянная мощность), чтобы могла выполняться реальная работа.
«Полная мощность» — это мощность, которую поставляют энергетические компании, как показано на рис.1. Таким образом, «полная мощность» — это мощность, поставляемая по электрической сети, чтобы произвести требуемое количество активной мощности.
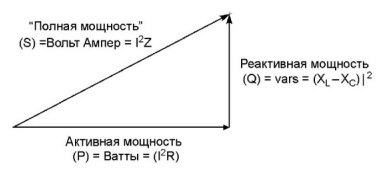
Рис. 1
Ранее приведенное определение КМ, через угол сдвига между током и напряжением, действительно при рассмотрении сигналов идеальной синусоидальной формы, как для тока, так и напряжения. Однако, большинство ИП потребляют несинусоидальный ток. Когда ток не является синусоидальным, а напряжение является, КМ состоит из двух коэффициентов:
- коэффициента сдвига фаз (между током и напряжением), относящегося к фазовому углу;
- коэффициента нелинейных искажений, относящегося к форме волны.
Уравнение 1 представляет соотношение между коэффициентом сдвига фаз и коэффициентом нелинейных искажений и как они соотносятся с КМ:
PF=[Irms(1)/ Irms]·cosφ (1),
где:
Irms (1) — это общий ток потребляемый системой;
Irms — среднеквадратичная величина тока.
Поэтому, цель схемы коррекции КМ — минимизировать искажения входного тока и привести в соответствие фазы тока и напряжения.
Когда КМ не равен 1, форма волны тока не следует за формой волны напряжения. Это приводит не только к потере мощности, но и к генерации гармоник, которые, распространяясь по питающей линии, нарушают работу других устройств, подключенных к линии. Чем ближе КМ к 1, тем меньше амплитуда токовых гармоник, поскольку вся мощность будет содержаться в первой гармонике, т.е. на основной частоте питающей сети.
Нормативные документы ЕС
В 2001 г. Европейский Союз привел в действие документ ЕN61000-3-2, устанавливающий ограничения на гармоники входного переменного тока вплоть до 40-й гармоники. Прежде, чем ЕN61000-3-2 вступил в силу, существовала норма, принятая в октябре 2000 года, которая определяла соответствие устройств ограничениям эмиссии строгого Класса D. На рис.2 приведены форма тока и напряжения в одной фазе с КМ=1. Это такие устройства, как персональные компьютеры, компьютерные мониторы, и телевизионные приемники.

Рис. 2
Что касается других устройств, то они должны были соответствовать требованиям пределов излучения облегченного Класса А, при котором достигается КМ=0,9. На рис.3 показана квазикоррекция КМ.
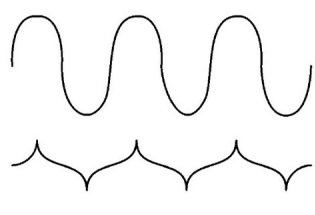
Рис. 3
Причины неэффективности ИИП
Проблемой импульсных источников питания (ИИП) является то, что они не используют коррекцию КМ, и то, что входной конденсатор СIN (показанный на рис.4) будет заряжаться только тогда, когда VIN близко к VPЕАК или когда VIN больше, чем напряжение на конденсаторе VCIN. При конструировании ИИП, время удержания для напряжения на СIN задается больше, чем частота VIN, поэтому, если происходит сбой VIN, и несколько циклов пропускаются, СIN будет иметь достаточно сохраненной энергии, чтобы питать нагрузку.
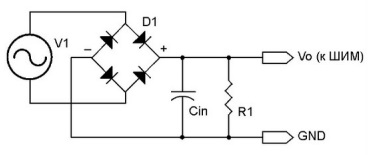
Рис. 4
На рис.5 представлен теоретический результат VCIN(t) (для схемы на рис.4) с очень маленькой нагрузкой, и, следовательно, с очень небольшим разрядом СIN. Как только ток потребления нагрузки возрастает, VCIN(t) будет падать больше между двумя пиками, но это падение невелики в процентном соотношении к общему VIN (к примеру, при напряжении 120 В, падение может быть всего лишь 3…5 В). Как отмечалось ранее, СIN будет заряжаться только тогда, когда VIN больше, чем напряжение, до которого заряжен конденсатор. Это означает, что схема, не имеющая КМ, будет заряжать СIN только в течение малой части всего времени цикла.
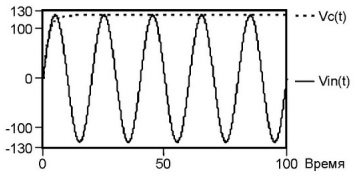
Рис. 5
На рис.6 приведены форма сигналов тока и напряжения в схеме по рис.4. Как видно из рис.6, после отметки 90 градусов первой половины цикла, выходное напряжение выпрямительного моста падает ниже напряжения конденсатора (СIN), и зарядка конденсатора прекращается. Следует заметить, насколько велик входной токовый пик заряда конденсатора. Все части схемы в блоке питания (провода, диоды моста, переключатели) должны быть способны выдержать этот большой токовый пик. В течение этих коротких периодов СIN должен быть полностью заряжен. Таким образом, от VIN потребляются большие импульсы тока малой продолжительности. Существует способ усреднить этот токовый пик, таким образом, чтобы остальная часть цикла использовалась для аккумулирования энергии, по сути, сглаживая большой токовый пик, с использованием коррекции КМ.
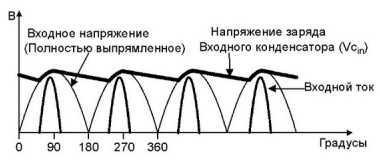
Рис. 6
Для того чтобы ток потребления более точно следовал за величиной VIN и не допускать появления токовых импульсов большой амплитуды, СIN должен заряжаться в течение всего цикла, а не в течение его малой части. При сегодняшних нелинейных нагрузках ИИП невозможно точно знать, когда потребуется большая амплитуда тока, поэтому поддержание входного тока конденсатора постоянным в течение всего цикла является наиболее целесообразным, и позволяет использовать конденсатор СIN намного меньшего номинала. Этот метод работы и называется коррекцией коэффициента мощности.
Повышающий преобразователь — сердце схемы коррекции КМ
Схема повышающего преобразователя используется для получения активной коррекции КМ во многих прерывистых и непрерывных режимах. Повышающий преобразователь используется потому, что его легко реализовать, и он работает хорошо. Простая схема на рис.7 — это краткое напоминание о том, как катушки индуктивности (далее — индукторы) могут производить очень большие напряжения.

Рис. 7
Изначально предполагается, что индуктор обесточен, поэтому напряжение V0 равно VIN. Когда ключ замыкается, ток (IL) через индуктор постепенно линейно возрастает, поскольку:
IL=1/L·(∫ VLdt)
Напряжение (VL) на нем возрастает экспоненциально, пока не стабилизируется на уровне VIN. Следует отметить полярность напряжения вдоль индуктора, которая определяется направлением тока (сторона втекания — положительная). Когда ключ размыкается, это приводит к изменению тока от IMAX до нуля (что является уменьшением или отрицательным спадом). Математически это выглядит так:
VL=Ldi/dt≈L·∆i/∆t,
или величина индуктивности (L) умноженная на изменение тока за единицу времени, т.е. напряжение на индуктивности приближается к отрицательной бесконечности (индуктор изменяет его полярность). Индуктор не идеален и имеет небольшую величину последовательного сопротивления, которое ограничивает это «бесконечное» напряжение конечной величиной. Когда ключ будет разомкнут, напряжение на индукторе меняет полярность и суммируется с напряжением источника VIN. Если бы последовательно соединенные диод и конденсатор были бы подключены к выходу этой схемы, то конденсатор через диод зарядился бы до этого высокого напряжения (возможно, после множества циклов переключения).
Таким образом, повышающий преобразователь увеличивает напряжение, как показано на рис.8. На вход преобразователя поступает выпрямленное напряжение с моста D1.

Рис. 8
После мостового выпрямителя нет никаких фильтрующих конденсаторов, поэтому входное напряжение повышающего преобразователя изменяется (на удвоенной частоте питающей сети) от нуля до VPЕАК входного переменного напряжения и обратно до нуля. Повышающий преобразователь должен удовлетворять двум одновременным условиям:
- выходное напряжение повышающего преобразователя должно быть установлено больше, чем пиковое значение (отсюда слово «повышающий») напряжения сети (часто используемое значение 385 В постоянного напряжения для сети с переменным среднеквадратичным значением 220 В);
- ток, потребляемый от сети в любой момент, должен быть пропорционален напряжению линии.
Без использования коррекции КМ, типичный ИИП имеет КМ порядка 0,6, что приводит к значительным гармоническим искажениям нечетного порядка (иногда с третьей гармоникой такой же по амплитуде, как и основная). КМ менее чем 1 вместе с гармониками от «пикастых» нагрузок, это увеличивает активную мощность, необходимую для работы устройства. Для того чтобы работало такое неэффективное устройство, энергетическая компания должна поставлять дополнительную ре активную мощность, чтобы компенсировать эти потери. Это увеличение мощности вынуждает энергетические компании использовать более мощные линии передачи электроэнергии, иначе их саморазогрев может вызвать выгорание нейтрального проводника линии. Гармонические искажения могут вызвать увеличение рабочей температуры генераторной установки, что сокращает срок службы оборудования, в том числе: кабелей, трансформаторов, конденсаторов, предохранителей, переключателей и подавителей выбросов.
Проблемы вызывают гармоники, создающие дополнительные потери и электростатические напряжения в конденсаторах и кабелях, увеличивая токи в обмотках вращающегося машинного оборудования и трансформаторов, а также шумовое излучение во многих устройствах, и вызывая ранний выход из строя предохранителей и других компонентов безопасности. Они также могут вызвать поверхностный эффект протекания тока, который создает проблемы в кабелях, трансформаторах и вращающемся машинном оборудовании. Вот по чему компании-производители электроэнергии озабочены ростом ИИП, электронных регуляторов напряжения и преобразователей, которые приводят к росту коэффициента нелинейных искажений до неприемлемых значений.
Делая напряжение входного преобразователя больше, чем входное напряжение, мы вынуждаем нагрузку потреблять ток синфазно с напряжением сети, что, в свою очередь, избавляет от гармонических излучений.
Режимы работы
Существует два режима работы схемы коррекции КМ: прерывистый и непрерывный. Прерывистый режим устанавливается, когда MOSFET транзистор повышающего преобразователя включается, и когда ток индуктора достигает нуля, и он выключается, когда ток индуктора достигает желаемого входного опорного напряжения, как показано на рис.9. Таким образом, форма входного тока следует за формой входного напряжения, что обеспечивает КМ близкий к 1.

Рис. 9
Прерывистый режим работы может использоваться в ИИП мощностью 300 Вт или менее. По сравнению с устройствами непрерывного режима, прерывистый режим используется с сердечниками большего размера, и имеет большие потери на активное сопротивление и поверхностный эффект из-за большего размаха тока в индукторе. С увеличением размаха требуется больший входной фильтр. Положительная сторона в том, что поскольку устройства прерывистого режима включают MOSFET-транзистор, когда ток индуктора равен нулю, не возникает обратного тока восстановления (IRR) на диоде вольтдобавки. Это означает, что может быть использован более дешевый диод.
Непрерывный режим используется в ИИП мощностью более 300 Вт. В этом режиме MOSFET-транзистор повышающего преобразователя не включается, когда ток повышающего индуктора равен нулю, поскольку, ток в индукторе никогда не достигает нуля во время цикла переключения (рис.10).
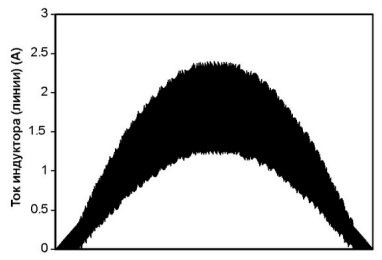
Рис. 10
Принимая это во внимание, размах напряжения меньше, чем в прерывистом режиме — приводит к меньшим потерям на активном сопротивлении. А меньший пульсирующий ток приводит к меньшим потерям в сердечнике индуктора. Меньший размах напряжения также уменьшает электромагнитную интерференцию, и позволяет использовать меньшие входные фильтры. Поскольку МОSFЕТ-транзистор не включается, когда ток повышающего индуктора равен нулю, требуется быстродействующий диод с малым временем восстановления, чтобы уменьшить потери до минимума.
Фирма Fairchild предлагает приборы для обоих: прерывистого и непрерывного режимов работы схемы коррекции КМ, включая режим критической проводимости (FAN7527В), режим усреднения тока (FAN4810), и режим формирования входного тока (FAN4803).
Прерывистый режим — режим критической проводимости
Режима критической проводимости — это режима работы прибора по напряжению, который работает в области между прерывистым и непрерывным режимами. Чтобы лучше объяснить режим критической проводимости, давайте взглянем на различие между прерывистым и непрерывным режимами в такой конструкции ИИП, какобратнохо- довой преобразователь. В прерывистом режиме, первичная обмотка трансформатора имеет время запаздывания, с момента размыкания ключа (включая минимальное время сброса для обмотки), и перед тем, как она вновь оказывается под напряжением (рис. 11).

Рис. 11
В непрерывном режиме, первичная обмотка не полностью расходует свою энергию. На рис.12 показано, что ток в первичной обмотке не начинается от нуля, поскольку остаточный ток все еще протекает в этой обмотке.

Рис. 12
Непрерывный режим — режим среднего тока
Основой контроллера коррекции КМ является модулятор коэффициента усиления. Этот модулятор имеет два входа и один выход. На рис.13 приведен пример схемы усреднения тока коррекции КМ на ИМС типа МL4821. Как показано на рис.13, вход блока модулятора коэффициента усиления (слева на рис.13) называется токовым опорным входом (I). Опорный ток — это входной ток, который пропорционален двухполупериодному выпрямленному напряжению. На другой вход, блока модулятора коэффициента усиления (на рис.13 — внизу), поступает сигнал от усилителя ошибки напряжения Е/А. Усилитель ошибки считывает выходное напряжение (используя делитель напряжения) после диода вольтдобавки и сравнивает его с эталонным напряжением VREF = 5 В. Усилитель ошибки будет иметь малую полосу пропускания, чтобы не позволить любым резким изменениям быстро появиться на его выходе.

Рис. 13
Модулятор коэффициента усиления умножает опорный ток и напряжение ошибки поступающее от усилителя ошибки (определяемое выходным напряжением).
На рис.13 показаны основные блоки внутри МL4821 (отдельно взятого контроллера коррекции КМ), которые позволяют обеспечить КМ преобразователя больше, чем 95 %. Эти блоки включают:
- петлю токового управления;
- петлю управления по напряжению;
- ШИМ управление;
- модулятор коэффициента усиления.
Назначение токовой петли управления заключается в том, чтобы заставить форму тока в питающей сети следовать за формой напряжения в сети. Для того чтобы ток следовал за напряжением, внутренний токовый усилитель должен иметь достаточно широкий диапазон рабочих частот, чтобы пропускать достаточное число гармоник выходного напряжения. Ширина диапазона рабочих частот усилителя задается использованием определенных номиналов внешних конденсаторов и резисторов. В большинстве случаев ширина его полосы пропускания составляет несколько кГц. Усилитель использует информацию с модулятора коэффициента усиления, чтобы подстроить схему ШИМ-управления, которая включает или выключает МОSFЕТ-транзистор.
Модулятор коэффициента усиления и петля управления по напряжению работают вместе, осуществляя выборку входного тока и выходного напряжения, соответственно. Эти два измерения выполняются и затем сравниваются друг с другом, чтобы определить, надо ли изменять сигнал на входе токового управления. Этот сигнал затем сравнивается с образцом выходного тока, чтобы определить коэффициент заполнения схемы ШИМ-контроллера.
ШИМ-управление использует модуляцию длительности импульса, изменяя положение заднего фронта импульса, как показано на рис.14.

Рис. 14
Пилообразные колебания формируются на выходе дифференциального усилителя внутри токовой петли управления. Выход дифференциального усилителя (показан в верхней части рис.13) подключается к входу RS-триггера, который управляет мощным МОSFЕТ-транзистором.
На рис. 15 показана форма сигнала в типовой схеме усреднения тока коррекции КМ.
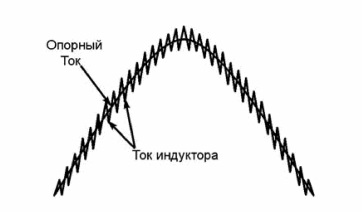
Рис. 15
Непрерывный режим — формирование входного тока
ИМС FAN4803 фирмы Fairchild обладает способностью формировать входной токе использованием непрерывного токового режима коррекции КМ. На рис.16 показан внутренний блок коррекции КМ ИМС FAN4803. В отличие от типового контроллера коррекции КМ усредненного токового режима, FAN4803 не нуждается во входной информации о напряжении и в использовании умножителя. Эта ИМС изменяет скорость нарастания внутреннего пилообразного сигнала согласно выходному напряжению усилителя ошибки. При этом информация о считанном токе и пилообразный сигнал используются, чтобы определить время включенного состояния ключа.

Рис. 16
Как показано на рис.17, ключ замыкается, когда текущее значение напряжения соответствует значению внутреннего пилообразного сигнала, и ключ размыкается внутренним тактовым сигналом. Чтобы управлять выходным напряжением, скорость нарастания внутреннего. Сравнивая рис.17, а и рис. 17, б можно увидеть, что средний ток возрастает, если скорость нарастания возрастает, и уменьшается, если скорость нарастания «пилы» уменьшается.
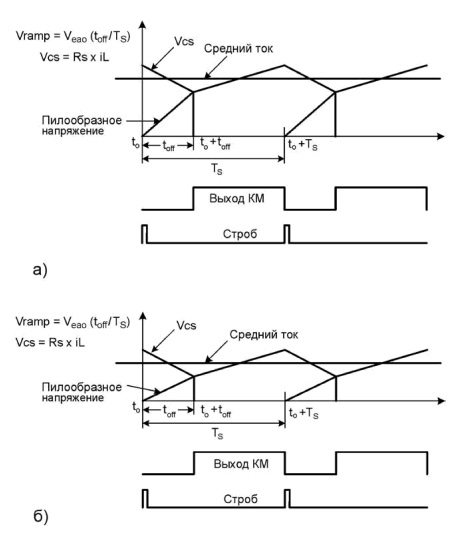
Рис. 17
Используя характеристику непрерывного режима, можно математически показать, что ток индуктора пропорционален синусоидальной форме питающей сети. Следовательно, минимальная величина тока индуктора в течение одного цикла переключения следует за синусоидальным опорным током, как показано на рис.18.
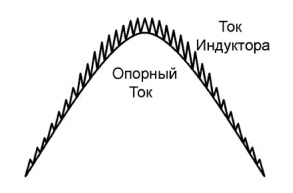
Рис. 18
Тем не менее, максимальная величина тока индуктора в течение одного цикла переключения не управляется, чтобы следовать за синусоидальным опорным током. Следовательно, средний ток индуктора может не быть синусоидальным. Чтобы сделать средним ток индуктора близким к синусоидальному опорному току, индуктивность должна быть достаточно большой, чтобы сделать пульсации тока маленькими.
Заключение
Энергетические компании не рады устройствам с низким коэффициентом мощности, особенно когда дополнительная стоимость неиспользованной или неиспользуемой мощности может быть очень большой. Вот почему применение схемы коррекции КМ на стороне потребителя стало важной частью конструирования силовых систем для большого числа изделий.
Существует множество стандартов (к примеру, EN 61000-3-2), указывающие как управлять силовым потреблением с КМ=1 и сохранять при этом минимальные гармонические искажения.
В зависимости от выходной мощности и потребностей разработчика, ИИП может быть разработай с применением прерывистого или непрерывного режима управления коррекцией КМ, также может использоваться устройство коррекции КМ с ШИМ управлением. Рынок контроллеров коррекции КМ составил 275 миллионов USD в 2014 году, а стандарты требуют уменьшать минимальные мощности систем, в которых требуются устройства коррекции КМ, поэтому устройства коррекции КМ будут использоваться все больше и больше.
Источники информации:
- AN42047.pdf. Power Factor Correction Basics. — Fairchild Semiconductor Corporation. www.fairchildsemi.com.
Автор: Андрей Феклистов, г. Запорожье
Источник: Радиоаматор №5, 2015