 Для автоматизации механизмов рассматриваемого класса предпочтительно применение вращающихся кулачковых либо бесконтактных командоаппаратов. Вал командоаппарата связан с валом привода через редуктор, передаточное число которого выбирают из условия поворота барабана командоаппарата за 1 шаг механизма на угол 360 либо 180°. Возможно также применение датчиков положения (путевых или конечных выключателей, бесконтактных датчиков), на которые воздействуют управляющие элементы, связанные с механизмом. Таких элементов требуется несколько, и расстояние между ними определяется длиной шага механизма.
Для автоматизации механизмов рассматриваемого класса предпочтительно применение вращающихся кулачковых либо бесконтактных командоаппаратов. Вал командоаппарата связан с валом привода через редуктор, передаточное число которого выбирают из условия поворота барабана командоаппарата за 1 шаг механизма на угол 360 либо 180°. Возможно также применение датчиков положения (путевых или конечных выключателей, бесконтактных датчиков), на которые воздействуют управляющие элементы, связанные с механизмом. Таких элементов требуется несколько, и расстояние между ними определяется длиной шага механизма.
Релейные схемы управления шаговым движением
На рис. 1, а и б представлены варианты схем управления с использованием командоконтроллеров. В схеме рис 1, а используются два контакта командоаппарата SQ и блокировочное реле К, которое подготавливает очередное включение контактора КМ и затем отключается в середине хода механизма. Диаграмма замыканий контактов командоаппарата SQ приведена на рис. 1, ж. Реле KV обеспечивает нулевую защиту.
В схеме рис. 1,б применена одна цепь командоаппарата SQ и реле времени КТ, контакт которого шунтирует цепь SQ1 в момент начала очередного шага механизма. На рис 1, в—д показаны варианты схем с подачей импульсной команды на 1 шаг (автоматической — реле KQ либо ручной нажатием кнопки SB1).
Для автоматизации шагового перемещения в металлорежущих станках и автоматических линиях находит применение узел схемы с двумя реле K1 К2 и двумя диодами VD1, VD2 (рис. 1, е). В конце каждого цикла перемещения срабатывает путевой датчик SQ и его размыкающий контакт открывается. После подачи команды на шаг (реле KQ) включается реле К1, механизм начинает движение. Когда датчик освобождается, контакт SQ замыкается, включается и самоблокируется реле К2, его контакт в цепи катушки Д7 открывается.

Рис. 1. Релейные схемы управления шаговым перемещением механизма
Реле К1 теперь получает питание через размыкающий контакт SQ и диод VD1. После окончания перемещения на 1 шаг срабатывает путевой датчик SQ и реле К1 отключается, останавливая механизм. Очередной шаг совершается после отключения и нового включения реле KQ.
Схемы на логических элементах
Для простоты сопоставления схем в вариантах с логическими элементами показаны те же датчики, что и в релейно-контактных схемах. При использовании датчиков с бесконтактным выходом можно использовать те же функциональные узлы с упрощенными цепями входных сигналов. Схема шагового перемещения, построенная на элементах серии «Логика Т», с управлением командоконтроллером показана на рис. 2, а.
Элементы D1 —D3 обеспечивают согласование входных сигналов с логическими элементами. Память на элементах ИЛИ—НЕ D5.1 и D5.2 служит для запоминания исходного положения перед пуском, когда рукоятка командоконтроллера SM установлена в нулевое положение.
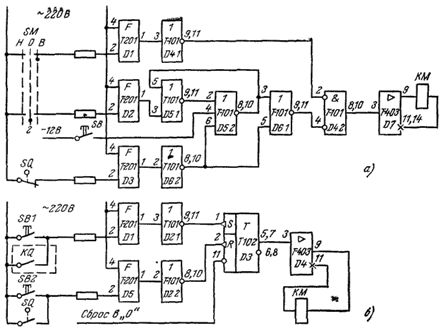
Рис. 2. Бесконтактные схемы управления шаговым, перемещением механизма: а — с управлением командоконтроллером, б — с автоматической командой
При этом цепь командоаппарата путевого выключателя SQ замкнута и на вход 6 элемента Памяти D5.2 и вход 5 элемента ИЛИ—НЕ D6.1 поступают сигналы 0. Сигнал 1 с выхода элемента D2 фиксируется Памятью D5.
Сигнал 1 с выхода Памяти поступает на вход 3 элемента D6.1 Следовательно, на вход 4 элемента D4.2, выполняющего функцию И с нулевыми сигналами, поступает 0. На вход 2 этого элемента поступают 1 с выхода элемента D4.1, следовательно, на выходе элемента D4.2 имеется сигнал 0 и выходной контактор КМ не включен. После переключения командоконтроллера SM в положение «вперед» В на вход элемента ИЛИ—НЕ D4.1 поступает сигнал 1, и на вход 2 элемента D4.2 приходит сигнал 0. На входе 4 этого элемента сохраняется 0, так как Память D5 остается включенной. При этом на выходе элемента D4.2 появляется сигнал 1 и через усилитель D7 включается контактор КМ. Двигатель пускается, и механизм начинает перемещаться.
В середине шага механизма контакт командоаппарата SQ размыкается и на выходе элемента D6.2 появляется сигнал 1, который отключает Память D5. Так как сигнал 1 теперь подается на вход 5 элемента D6.1, выходной сигнал на усилителе D7 остается без изменений.
После появления сигнала 1 с командоалпарата SQ в конце шага на вход элемента D6.1 с выхода элемента D6.2 поступает сигнал 0. Так как на входе 3 этого элемента, соединенном с выходом Памяти D5, также имеется сигнал 0, то на выходе элемента D6.1 появляется сигнал 1, соответственно на выходе элемента D4.2—сигнал 0, контактор КМ отпадает и механизм останавливается.
Для повторного включения привода механизма необходимо установить рукоятку командоконтроллера SM в нулевое положение для включения Памяти D5 и затем перевести ее в положение «вперед».
Кнопка SB служит для установки Памяти в исходное состояние после включения питания схемы.
Схема управления шаговым движением с автоматической командой показана на рис. 2, б. Элементы D1 и D5 служат для согласования входных сигналов с логическими элементами. Схема основана на использовании триггера Т (элемент D3 типа Т-102) с раздельными импульсными входами. Такой триггер переключается при изменении входного сигнала с 1 на 0. Триггер предварительно устанавливается в исходное состояние подачей сигнала 0 на вход R.
В исходном состоянии на выходах элементов D1 и D5 имеется сигнал 0 и, следовательно, на выходах элементов D2.1 и D2.2 сигнал 1. При замыкании контакта командного реле KQ или нажатии кнопки SB1 «пуск» на выходе элемента D2.1 появляется сигнал 0, триггер переключается в состояние 1 и контактор КМ включается через усилитель D4. Механизм начинает движение.
При замыкании контакта командоалпарата SQ на выходе элемента D2.2 появляется сигнал 0, триггер переключается в состояние 0, контактор отключается и механизм останавливается. Кнопка SB2 служит для ручной аварийной остановки.