В статье рассматриваются практические решения для управления униполярными шаговыми двигателями. Рассматриваемые решения могут быть легко использованы на практике для различных приложений. В настоящей статье даются рекомендации по проектированию электроприводов униполярными шаговыми двигателями и предлагаются несложные практические решения. По собственному опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных шаговых двигателей.
В настоящей статье даются рекомендации по проектированию электроприводов униполярными шаговыми двигателями и предлагаются несложные практические решения. По собственному опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных шаговых двигателей.
Напомню, что основное свойство шагового двигателя в отличие от других типов электродвигателей как переменного, так и постоянного тока является то, что сдвиг его ротора осуществляется на заданный его конструкцией шаг (чаще это угол, реже – линейное смещение) при подаче на его обмотки импульсов напряжения. В этом он похож на шаговое реле, известное еще с XIX века. Его нельзя путать и с многофазными двигателями. Формально шаговые двигатели относятся к двигателям постоянного тока, но они не имеют коллектора (поэтому надежность их выше и помех от них значительно меньше). Для создания момента вращения в этих двигателях, в отличие от коллекторных двигателей постоянного тока, требуется внешнее импульсное управление обмотками, которые расположены не на роторе (который представляет собой постоянный магнит), а на статоре. Другими словами, если вы подадите на обмотку такого двигателя постоянное напряжения, то вращения ротора не будет. Нужно специальное устройство управления – коммутатор. В этом они проигрывают традиционным коллекторным двигателям постоянного тока. Но зато они выигрывают в большем моменте на малых и сверхмалых скоростях вращения, поэтому во многих применениях им не нужен редуктор. Кроме того, они обеспечивают без специальных конструктивных или схемных ухищрений точное позиционирование ротора и торможение, так как обладают не только моментом вращения, но и моментом удержания, который по величине выше момента вращения.
Имеются шаговые двигатели не только традиционного исполнения с вращающимся ротором, но и с его линейным перемещением. В последнем случае на один управляющий импульс происходит линейное смещение ротора на строго заданную конструкцией двигателя величину (подробности см. в [1]). Еще одно важное замечание: шаговый двигатель, в отличие от коллекторного, при стопорении ротора не увеличивает потребление энергии.
Конструкция двигателя
Шаговые двигатели различаются, как по конструктивному исполнению, так и по конфигурации соединения их обмоток. Исполнение двигателей в части обмоток может быть биполярное и униполярное. Основное преимущество униполярных шаговых двигателей заключается в простоте их систем управления, но они имеют меньший момент вращения [1]. На рис.1,а показано «классическое» исполнение включения обмоток, а на рис.1,б – универсальное с расщепленными обмотками, которое позволяет включать двигатель, как в униполярном, так и в биполярном вариантах. Кроме того, в «классическом исполнении» в некоторых типах двигателей средние выводы обмоток (выводы АВ, CD на рис.1,а) могут быть конструктивно объединены внутри самого двигателя (такой вариант как раз показан на фото в начале статьи). Так что если вам попался в руки неизвестный шаговый двигатель, то по количеству выводов вы относительно легко сможете его идентифицировать. Двигатели с шестью и пятью выводами будут гарантировано униполярными. Остается только оп разделить фазировку обмоток. К сожалению, это можно будет сделать только экспериментально. Какой-либо стандартизации по цвету проводов пока нет.
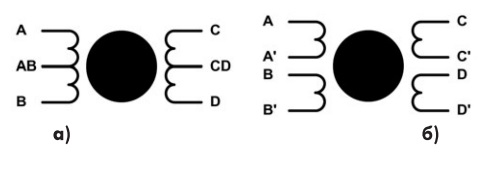
Figure. 1
Конфигурация обмоток униполярных шаговых двигателей и двигателей с расщепленными обмотками в униполярном включении позволяет обойтись без сложных драйверов и дорогостоящих ИМС. Кроме того, классические униполярные двигатели дешевле, так как, в основном, этот тип включения обмоток характерен для двигателей на постоянных магнитах с шагом 18° или 7,5°. Дробление такого большого шага осуществляется, как правило, дополнительным редуктором, который может быть конструктивно совмещен с двигателем [2].
Схема управления униполярного шагового двигателя с универсальным коммутатором
Практическое решение для управления униполярным шаговым двигателем потребовалось автору при использовании двигателя серии P542-M48 [2], а именно униполярного шагового двигателя P542-M482U с встроенным редуктором G23 (125:1). Поскольку двигатель униполярный, то схема его управления, как было указано выше, не содержит ни дорогих ИМС, ни специальных сложных драйверов, достаточно обычных ключей. Коммутатор включения обмоток выполнен на базе технического решения, опубликованного в [3]. Пример практической схемы управления, разработанной автором статьи, которая годится для самых различных применений, показан на рис.2.

Figure. 2
Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «STEP» («Шаг»), необходимое направление вращения устанавливается через вход «DIRECTION» («Направление вращения»). Оба эти сигнала имеют логические уровни, и если для их формирования используются выходы с открытым коллектором, то требуются соответствующие резисторы подтяжки (на схеме рис.2 они не показаны). Временная диаграмма работы коммутатора (рис2) показана на рис.3, где верхние две трассы – Q1 D2-2, 02 D2-2; нижние две трассы – Q1 D2-1, Q2 D2-1. Маркеры показывают область изменения очередности включения фаз.
Как можно видеть, здесь реализован полношаговый режим управления (подробно см. [1]) с перекрытием фаз, то есть один импульс сдвигает ротор двигателя на один шаг, но в некоторый момент (половина длительности импульса) фазы накладываются друг на друга (рис.3).
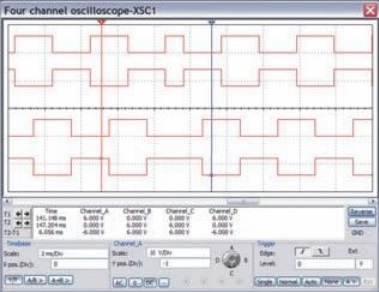
Figure. 3
Схема управления шаговым двигателем без реверса
Если нет необходимости в реверсе, то схема коммутатора может быть значительно упрощена (рис.4), при этом частота вращения остается неизменной, а диаграмма управления остается аналогичной той, которая показана на рис.3 (трассы до переключения очередности фаз), но уже без возможности изменения направления вращения двигателя.
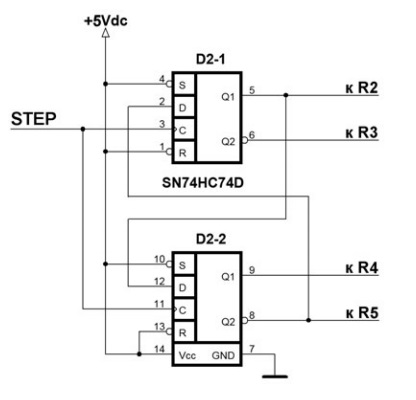
Figure. 4
Схема управления с режимами удержания и выключения
Управление моментом вращения устанавливается изменением тока в обмотках двигателя от регулируемого источника напряжения положительной полярности (автором использовался импульсный понижающий стабилизатор, выполненный по типовой схеме на стандартной ИМС с опцией внешнего включения). Расчет такого DC/DC-преобразователя можно легко выполнить в интерактивном режиме [4], хотя за время, прошедшее со времени публикации, в этот on-line калькулятор высокого уровня и были внесены некоторые изменения, но основа осталась та же. Полное отключение двигателя без удержания ротора осуществляется снятием питающего напряжения с обмоток. Это легко выполнить через вход выключения преобразователя, задав в [4] при выборе ИМС соответствующую опцию. В авторском варианте использовалась ИМС LM2675M-ADJ [5]. Остановка с фиксацией ротора, режим удержания, осуществляется прекращением подачи напряжения с частотой коммутации (вход «STEP»), одновременно желательно уменьшить величину питающего обмотки напряжения Vdc по крайней мере вдвое. С этой точки зрения выбор преобразователя с возможностью регулировки выходного напряжения на ИМС, подобной LM2675M-ADJ, является оптимальным. Пример авторского варианта схемы для формирования напряжения питания обмоток шагового двигателя показан на рис.5. Такая схема пригодна для запитки шаговых двигателей любого типа.
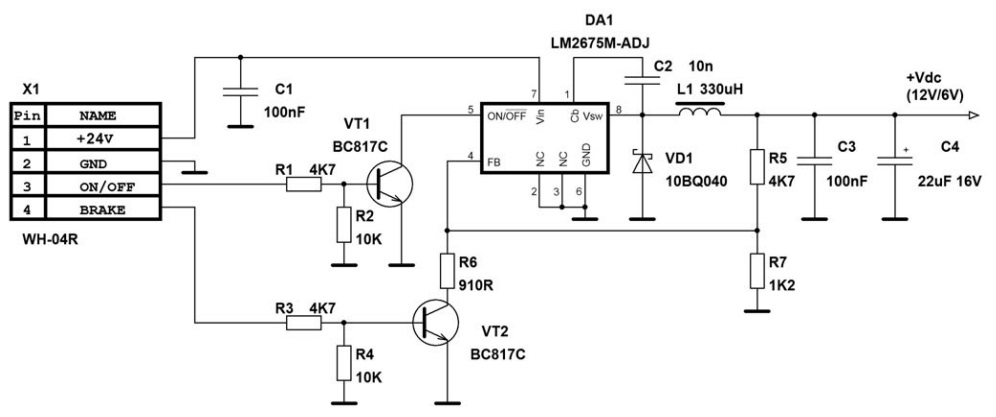
Fig. 5
Схема (рис.5) обеспечивает подачу двух стабильных напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания (формулы, необходимые для расчета выходного напряжения, приведены в [5]). Рабочий режим включается подачей высокого логического уровня на контакт BRAKE (торможение) разъема Х1. Допустимость снижения напряжения питания определяется тем, что момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя момент удержания с редуктором (25:6) равен 19,8 Н*см, а момент вращения всего 6 Н*см. Но при увеличении отношения эта зависимость нивелируется и для двигателей с редукторами с отношением 80 и выше практически не отличаются. Основное преимущество этого метода в том, что он позволяет уменьшить общее потребление тока. В нашем случае с 460 мА до 230 мА, то есть в 2 раза, а мощность в 4 раза, то есть с 5,52 Вт до 1,38 Вт.
Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт ON/OFF разъема X1. Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах на транзисторах VT1, VT2 нет необходимости, выходы схемы управления можно подключить непосредственно вместо упомянутых ключей.
Remarque. В этом варианте использование резисторов подтяжки недопустимо!
В качестве дросселя автором использовалась катушка SDR1006-331К (Bourns). Общее питание формирователя напряжения для обмоток двигателя в рассмотренных режимах может быть уменьшено до 16…18 В, что не окажет никакого влияния на его функционирование. Еще раз обращаю внимание, что при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть лучше закладывать номинальный ток схемы питания, равный удвоенному номинальному току обмоток.
Согласно спецификации [2] оптимальным для двигателей серии P542-M48 является шаг с частотой f=(300…500) Гц. Это и будет определять частоту вращения вала, но частота вращения зависит еще и от конструкции самого двигателя. В нашем случае, без учета редуктора, частота вращения составит:
f*7,5°/360°=(6,25-10,5) об/с,
где 7,5° – это угол поворота ротора двигателя на один шаг управления.
Этот угол как раз и задан конструктивно в самом двигателе. Дальнейшее понижение частоты вращения зависит уже от редуктора.
Изменение частоты вращения двигателя
Частота коммутации обмоток вполне может быть увеличена до 1,5 кГц. Для этого с целью компенсации уменьшения момента вращения неизбежного с ростом частоты применяются специальные методы запитки обмоток двигателя. Если внимательно читать спецификацию [2], то можно заметить, что момент вращения двигателя (сноска «Standard Versions») задан для двух условий, а именно: для условия обозначенного как L/R и условия, которое обозначено как L/4R. Можно заметить, что во втором случае частота вращения ротора шагового двигателя, при котором обеспечивается указанный в спецификации момент, заметно выше, а именно 550 Гц вместо 300 Гц. Что это за условия?
Проблема обеспечения момента вращения для шагового двигателя заключается в том, что для них не требуется подача напряжения, а требуется обеспечение тока в обмотках. Именно этот ток создает магнитное поле статора, взаимодействующее с постоянным магнитным полем ротора. Момент на роторе двигателя как раз и определяется взаимодействием этих магнитных полей.
Как известно, ток в индуктивности не может изменяться скачком, а растет по экспоненте до значения
lmax=Vdc/R;
l(t)=lmax*(1-e-t/t).
Требуемое для этого время определяется постоянной времени цепи:
t=L/R,
где:
L – индуктивность обмотки двигателя;
R – общее сопротивление в цепи обмотки.
Это сопротивление может быть как собственным активным сопротивлением обмотки двигателя RL, так и его суммой с некоторым добавочным резистором. Как видно из при веденной формулы, скорость изменения тока в обмотке обратно пропорциональна ее индуктивности и прямо пропорционально сопротивлению. Чем быстрее ток достигнет своего максимального уровня
lmax=Vdc/RL,
где Vdc – это номинальное напряжение запитки обмотки, a Rl – активное сопротивление в цепи обмотки, тем скорее установится заданный момент на роторе. Это и определяет скорость вращения вала шагового двигателя в зависимости от частоты коммутации. Таким образом, наша цель установить (насколько это возможно быстро) ток в обмотке на уровне Vcd/RL.
Импульсное питание двигателя
Просто увеличить напряжение на двигателе выше номинального крайне не желательно, даже если вы уверенны в том, что ток в обмотках при выбранной скорости вращения ротора не превысит допустимый. Остановка двигателя при такой подаче питания может привести к его выходу из строя. Уменьшить время установки номинального тока в обмотке можно, увеличив напряжение Vcd лишь на некоторое время, которое в несколько раз меньше длительности импульса управления, но это потребует дополнительных ключей, поэтому этот способ используется крайне редко. Самым простым методом оказывается включение последовательно с обмоткой двигателя дополнительного сопротивления с одновременным кратным увеличение напряжения питания Vcd. Это и ускорит накопление тока в индуктивности и не приведет к выходу двигателя из строя, так как требование по максимальному току обмотки не будет нарушено. Вот как раз на этот режим и «намекает» спецификация [2].
В классической теории используется режим L/5R, но для рассматриваемого типа двигателя спецификация рекомендует режим L/4R. Обращаю внимание, что здесь имеется в виду общее сопротивление, то есть сумма собственного сопротивления обмотки R1 и добавочного резистора номиналом 3RL. Ограничение на использование этого метода накладывает высокая рассеиваемая мощность на добавочных резисторах. В рассматриваемом случае при повышении напряжения питания до 4Vcd на добавочных резисторах при малых скоростях вращения, особенно при остановке двигателя, будет рассеиваться мощность:
PR=(3Vcd)2/3RL=(3*12)2/(3*52,4)=8,24 Вт.
Фактически, с учетом допустимого коэффициента нагрузки придется использовать добавочный резистор номиналом в 160 Ом с рассеиваемой мощностью 10 Вт. Как видим, эффективность такого решения крайне низкая. Как выход из положения – использование импульсных стабилизаторов с ограничением максимального тока.
В данном случае для управления биполярным двигателем был применен драйвер с встроенной функцией нарезки, так называемый, чоппинг (от английского термина «chopping» – нарезка). В чем суть этого метода? На двигатель от импульсного преобразователя подается повышенное в несколько раз напряжение, которое формирует ускоренный процесс установления максимального тока обмоток, после достижения заданной величины тока, преобразователь переходит из режима стабилизации напряжения в режим стабилизации тока и удерживает ток обмотки на заданном уровне. Это решение нельзя назвать дешевым, но его КПД несравненно выше. Сравнение методов управления током в обмотках двигателя показано на рис.6.
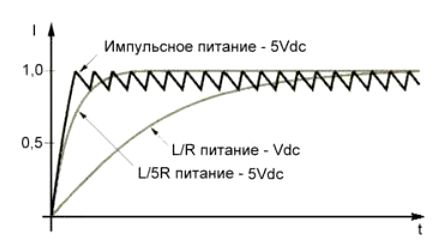
Рис. 6
Еще одним важным моментом является правильный выбор диодов, шунтирующих обмотку двигателя (VD1-VD4, рис.2). Назначение этих диодов – гасить э.д.с. самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, то неизбежен выход из строя транзисторных ключей и устройства в целом.
Естественно, что и выбор транзистора для ключей управления обмотками должен осуществляться с учетом максимального тока коммутации, а его подключение учитывать необходимость заряда/разряда емкости затвора. В ряде случаев прямое подключение выходных MOSFET-транзисторов к ИМС коммутатора может быть недопустимым. В этом случае необходимо предусмотреть соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с малым током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I=230 мА ток управления по базе ключа должен составить по крайней мере не менее 15 мА (хотя для нормальной работы ключа нужен ток базы 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем типа 74HC74 недостижим, поэтому потребуются дополнительные драйверы для выходных ключей.
Таким образом, самым оптимальным для управления коммутацией обмоток является использования подходящих по току и сопротивлению канала в открытом состоянии Rdc(on) полевых транзисторов с изолированным затвором (MOSFET) с учетом рекомендаций, описанных выше. В авторском варианте использовали транзисторы IRLML2803 с Rdc(on)=0,25 Ом, допустимой мощность рассеивания 540 мВ и постоянным током стока 0,93 А при температуре 70°С. Мощность, рассеиваемая на ключах, выполненных на транзисторах IRLML280, при полной остановке ротора не превысит:
PVT<Rdc(on)*I2=0,25*(0,230)2=13,2 мВт.
В большинстве случаев такой оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их полного расчета можно воспользоваться методикой, приведенной, например, в [6].
В завершение еще раз небольшое напоминание. Когда речь идет о частоте вращения ротора шагового двигателя, то имеется ввиду именно вращение ротора самого двигателя без редуктора. При этом необходимо учитывать угол поворота его ротора на один шаг. Для рассматриваемого типа двигателя он составляет 7,5°. Имеются шаговые двигатели с углом поворота на один шаг от 18° до 0,9° (чаше 1,8°). Для получения конечного результата необходимо обязательно учитывать этот параметр и коэффициент понижения частоты вращения ротора двигателя соответствующим редуктором. Все необходимые параметры для правильного выбора типа двигателя серии P542-M48 приведены в спецификации [2].
Littérature
- Рентюк В. Шаговые двигатели и особенности их применения // Электрик. – 2012. – №11.
- Geared stepper motor Р542-М48 series, Mclennan Servo Supplies Ltd.mclennan.co.uk.
- Rentyuk V. Control stepper motors in both directions // – 2010. – March 18.
- Рентюк В. Проектирование DC/DC-преобразователей в системе WEBENCH Design Center // Электрик. – 2013. – №10.
- LM2675 SIMPLE SWITCHER Power Converter High Efficiency 1A Step-Down Voltage Regulator, Texas Instruments Inc., Rev. June 2005.
- Дьяконов В.П., Маскимчук A.A., Ремнев A.M., Смердов В.Ю. Энциклопедия устройств на полевых транзисторах. – М.: СОЛОН-Р, 2002.
Auteur : Владимир Рентюк, г. Запорожье, Украина