В статье представлены схема и конструкция, описан принцип действия драйвера биполярного шагового двигателя на базе микроконтроллера ATmega48. Он способен работать со многими двигателями, не содержит специализированных микросхем для управления шаговыми двигателями. Универсальность обеспечена оригинальным методом поддержания заданного тока в обмотках двигателя. Эта конструкция может послужить основой для создания аналогичных устройств, содержащих дополнительные элементы безопасности – опторазвязку входных цепей, защиту от замыкания нагрузки и пр. В описываемом устройстве в связи с предполагаемыми “умеренными”условиями его эксплуатации и для ограничения стоимости такие узлы не предусмотрены.
Целью разработки было создание простого и недорогого драйвера биполярного шагового двигателя универсального применения. Всё программное обеспечение написано на языке ассемблера AVRASM и оптимизировано по времени выполнения, что позволило решить задачу на имеющейся на момент разработки элементной базе.
Main technical characteristics
- Напряжение питания силовой части, В ……………….27
- Напряжение питания логической части, В …………….12
- Максимальная амплитуда тока фазы двигателя, А, не менее ………………….. 5
- Минимальная амплитуда тока фазы двигателя, А, не более …………………..0,25
- Предустанавливаемый коэффициент деления шага … .1/8, 1/4, 1/2, 1/1
- Автопонижение тока в режиме удержания, %……………65
- Задержка автопонижения тока относительно последнего шага, с …………..3,4
- Уровни управляющих сигналов ………………….ТТЛ,5 В
- Максимальная частота шагов, кГц…………………..12
- Габариты, мм ………….102x68x40
Принципиальная схема драйвера приведена на рис. 1 . В его основу положены мостовые формирователи тока фаз А и В на полевых транзисторах VT1-VT4, VT5-VT8 соответственно, управляемые специализированными микросхемами-драйверами верхних и нижних ключей полумоста DA5-DA8 IR2104S. Для повышения помехоустойчивости применено раздельное питание силовой части (27 В) и логической части с драйверами силовых ключей (12 В).
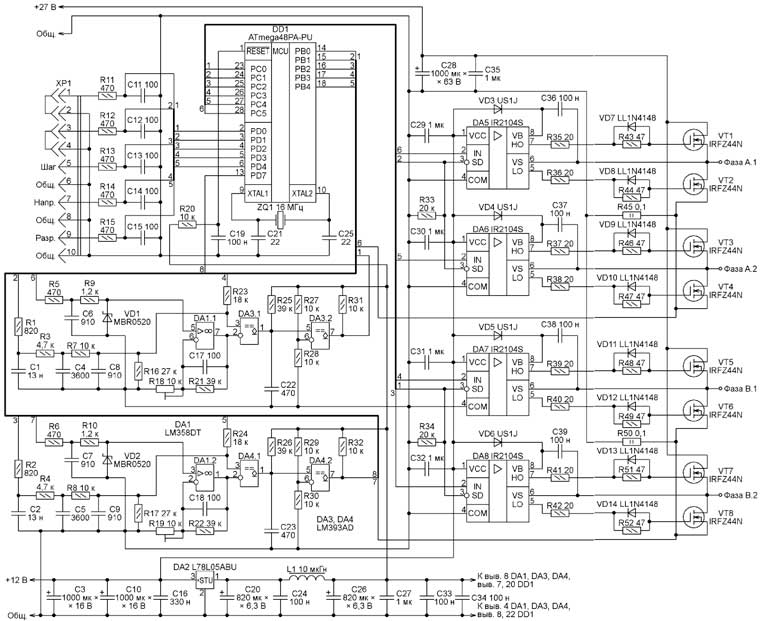
Figure. 1
Далее рассмотрим часть схемы, относящуюся к одной из фаз (фазе А), поскольку часть, относящаяся к фазе В, действует аналогично.
Мгновенное значение тока фазы устройство определяет по падению напряжения на резисторе R45, которое через интегрирующую цепь R5C6 поступает на неинвертирующий вход усилителя DA1.1 с регулируемым коэффициентом усиления, выполняющего также функцию ФНЧ первого порядка. С выхода усилителя сигнал приходит на инвертирующий вход компаратора DA3.1. Компаратор сравнивает сигнал, пропорциональный текущему через фазу двигателя току, с образцовым напряжением. Его формирует в виде ступенчатой синусоиды (для микрошагового режима работы) Таймер 1 микроконтроллера, работающий в режиме “Быстрая ШИМ” без предварительного деления. Сигнал с выхода таймера пропущен через многозвенный фильтр R1C1R3C4R7C8. Период следования широтно-модулированных импульсов – 12,7 мкс, что соответствует частоте 78,4 кГц. Резистор R23 в рабочем режиме в формировании образцового напряжения не участвует, так как выход PB3 микроконтроллера, к которому он подключён, находится в высокоимпедансном состоянии.
В режиме удержания (после отсутствия импульсов на входе “Шаг” в течение последних 3,4 с) программа устанавливает на выходе PB3 микроконтроллера низкий логический уровень, и амплитуда образцового сигнала понижается. С выхода компаратора DA3.1 с открытым коллектором, нагруженного резистором R25, результат сравнения поступает на вход компаратора DA3.2. Выход компаратора DA3.1 связан также с общим проводом через конденсатор C22. Совместно R25 и C22 – времязадающая цепь узла стабилизации тока. При его падении ниже некоторого образцового уровня происходит зарядка конденсатора C22 через резистор R25. В интервале времени от начала зарядки до достижения напряжением на конденсаторе значения, заданного делителем напряжения R27R28, питание обмотки двигателя отключено, что препятствует быстрым флюктуациям тока около образцового значения.
Этот алгоритм в классическом смысле не относится к алгоритмам стабилизации тока “Fixed-Frequency PWM” или “Fixed-Off-Time PWM”, однако на практике он показал хорошую работоспособность. При превышении током образцового значения на выходе компаратора DA3.2 установлен низкий логический уровень. Микроконтроллер реагирует на это отключением обмотки одновременным закрыванием транзисторов VT1-VT4 с помощью сигнала SD, подаваемого на драйверы DA5 и DA6. Этим достигается быстрый спад тока в обмотках двигателя. В случае спада тока ниже образцового происходит обратное, на драйверы DA5 и DA6 поступает сигнал SD высокого уровня, открывающий упомянутые транзисторы, что не препятствует нарастанию тока в обмотке.
Смена ступеней образцового напряжения, а также смена комбинаций открытых и закрытых транзисторов моста происходит с приходом очередного импульса на вход “Шаг” по алгоритмам, зависящим от предустановленного коэффициента деления шага (наличия перемычек между контактами 1-2 и 3-4 разъёма XP1) и текущего направления вращения (логического уровня сигнала на входе “Напр.”). Вход “Разр.” был задуман для разрешения и запрета работы двигателя, но в прилагаемой к статье версии программы он не действует.
Драйвер выполнен на двухсторонней печатной плате, чертёж печатных проводников которой изображён на рис. 2, а расположение элементов – на рис. 3. Транзисторы VT1-VT8 расположены с одной стороны платы теплоотводящими поверхностями от неё. К этим поверхностям прижат через изоляционные прокладки теплоотвод – в простейшем случае алюминиевая пластина размерами 60х60 мм. Следует заметить, что при токе фаз более 4…5 А и длительном режиме работы теплоотвода в виде пластины может оказаться недостаточно и его поверхность следует увеличить, сделав теплоотвод ребристым или игольчатым.

Fig. 2

Fig. 3
Материал платы следует выбрать толщиной не менее 1 …1,5 мм, толщина фольги – не менее 35 мкм. Печатные проводники, по которым течёт большой ток, следует обильно залудить или бандажировать медной проволокой, припаяв её по всей длине проводника.
Большая часть компонентов конструкции применена в оформлении для поверхностного монтажа. Резисторы и конденсаторы – типоразмера 1206. Резисторы R45, R50 имеют проволочные выводы и мощность – не менее 2 Вт. оксидные конденсаторы в цепях питания – с малым ESR. Подстроечные резисторы R18 и R19 – многооборотные 3296W.
Амплитудные значения тока фаз двигателя регулируют подстроечными резисторами R18, R19. Проще всего это делать, переведя драйвер в режим микрошага 1/8 и контролируя цифровым вольтметром падение напряжения на резисторах-датчикахтока R45 и R50. Подавая на вход “Шаг” одиночные импульсы, добиваются максимальных значений тока поочерёдно в фазах А и В. Подстроечными резисторами устанавливают эти значения одинаковыми и соответствующими требуемой амплитуде тока. Уменьшение сопротивления под-строечных резисторов приводит к снижению тока, и наоборот. Для ориентировки можно воспользоваться табл. 1, в которой приведена зависимость амплитуды тока фазы Imф от введённого сопротивления подстроечного резистора.
Table 1
| Imф, A | 0,25 | 0,5 | 1,0 | 2,0 | 3,0 | 4,0 | 5,0 | 6,0 | 6.5 |
| R18, R19, кОм | 0,31 | 0,62 | 1,27 | 2,62 | 4,07 | 5,62 | 7,29 | 9,09 | 10,04 |
Перед включением драйвера следует установить перемычки между контактами 1-2 и контактами 3-4 разъёма XP1, обеспечивающие нужный коэффициент деления шага двигателя в соответствии с табл. 2. Программа анализирует состояние перемычек однократно в начале своей работы, дальнейшее изменение их состояния никакого влияния на работу драйвера не оказывает. Переключение коэффициента деления “на ходу” в предлагаемой версии программы не предусмотрено.
Table 2
| Перемычки на ХР1 | Коэффициент деления шага | |
| 1-2 | 3-4 | |
| there is | there is | 1/1 |
| No | there is | 1/2 |
| there is | No | 1/4 |
| No | No | 1/8 |
Download программу микроконтроллера Atmega48 и файл печатной платы в формате Sprint Layout 6.0.
Author: М. Резников, г. Волчанск, Украина
Source: Радио №9, 2016
Здравствуйте ! собираюсь собрать контроллер этот но вот есть одно но ; какие фьюзы выставлять ?