Описано несложное устройство, позволяющее регулировать частоту вращения вала двигателя постоянного тока и поддерживать её установленное значение при изменении механической нагрузки на вал.
При разработке физического прибора потребовалось изготовить низкоскоростной привод вращения платформы, несущей различные датчики и другое оборудование. Необходимы были возможность оперативной регулировки частоты вращения и её стабилизация при изменении механической нагрузки.
Первый вариант привода состоял из малогабаритного электродвигателя постоянного тока серии ДПМ с редуктором из однозаходного стального червяка и текстолитового зубчатого колеса. Датчиком частоты вращения служил насаженный на вал двигателя диск с прорезями, входившими в зазор открытой оптопары.
Сигнал оптопары поступал на узел стабилизации, состоящий из генератора образцовой частоты, частотного дискриминатора и прочих необходимых элементов. Устройство отлично “держало” назначенную частоту вращения, не реагируя на внешние возмущения.
Но выявился крупный недостаток, о котором разработчики и не догадывались в начале работы. Привод сильно шумел. Шум шариковых подшипников двигателя, червячной пары передавался на закреплённые на платформе датчики и почти полностью “убивал” полезные сигналы. Попытки амортизировать привод не привели к успеху, так как при изменении момента сопротивления платформы вращению механизм раскачивался и равномерность вращения терялась.
Выход был найден в использовании привода программирующих колёс от видеомагнитофона (Figure. 1). Вал установленного в нём двигателя вращается в подшипниках скольжения, а червячная пара выполнена из материала, подобного капролону. Передаточное число механизма — 123, работает он практически бесшумно.

Figure. 1
Поскольку установить диск с прорезями в этом механизме оказалось очень сложно, пришлось изыскивать иной способ стабилизации частоты вращения. Была сделана попытка использовать узел стабилизатора частоты вращения двигателя от кассетного магнитофона. Однако этот узел хорошо стабилизировал только одно значение этой частоты. При попытке установить иное стабильность нарушалась. После долгого и бесполезного поиска приемлемого решения в литературе пришлось разрабатывать узел стабилизации самостоятельно.
Как известно, напряжение на выводах якоря двигателя постоянного тока складывается из падения напряжения на активном сопротивлении обмоток якоря и противоЭДС, прямо пропорциональной частоте вращения якоря. Эта ЭДС может служить мерилом частоты вращения. Но для этого нужно отделить её от падения напряжения на омическом сопротивлении обмотки.
Описанные в [1, 2] устройства, использующие противо ЭДС для стабилизации или регулирования частоты вращения двигателя либо хорошо поддерживают только одно установленное значение, либо, допуская регулировку частоты в широких пределах, не стабилизируют её при изменении нагрузки. Разработанное устройство отличается сочетанием обоих факторов — сохраняет произвольно установленную частоту вращения при изменении момента нагрузки.
Поставленная задача решается достаточно просто. В разработанном устройстве, схема которого изображена на Figure. 2, последовательно с якорем двигателя М1 включён резистор R1, сопротивление которого в точности равно активному сопротивлению якоря. Если из напряжения на якоре вычесть падение напряжения на этом резисторе, получим напряжение, пропорциональное частоте вращения якоря. Операцию вычитания выполняет узел на ОУ DА2.1. Это напряжение поступает на один из входов усилителя сигнала рассогласования на ОУ DА2.2, на другой вход которого подано образцовое напряжение, соответствующее желаемой частоте вращения. ОУ управляет транзистором VT1, регулирующим напряжение питания двигателя М1.

Fig. 2
Для лучшего понимания процесса регулирования рассмотрим упрощённую схему устройства, изображённую на Fig. 3. Из неё понятно, что активное сопротивление якоря г и резисторы R1—RЗ образуют измерительный мост, в диагональ которого включены входы ОУ DА2.1. Напряжение на выходе моста равно
 When exactly the equality
When exactly the equality![]() мост сбалансирован относительно напряжения питания двигателя U1 благодаря чему напряжение Uвых зависит только от противоЭДС якоря Е, т. е. от частоты его вращения. Изменение питающего напряжения U1 не разбалансирует мост, но вызывет изменение тока через двигатель, что приводит к изменению частоты его вращения и, соответственно, противоЭДС.
мост сбалансирован относительно напряжения питания двигателя U1 благодаря чему напряжение Uвых зависит только от противоЭДС якоря Е, т. е. от частоты его вращения. Изменение питающего напряжения U1 не разбалансирует мост, но вызывет изменение тока через двигатель, что приводит к изменению частоты его вращения и, соответственно, противоЭДС.
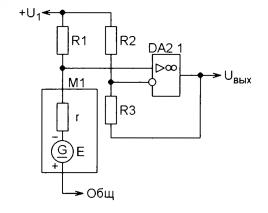
Fig. 3
Резистор R1 должен быть рассчитан на рассеивание мощности, равной максимальной мощности двигателя.
Необходимую частоту вращения устанавливают подстроенным резистором R5. Увеличение или уменьшение частоты вращения под нагрузкой свидетельствует о неточной балансировке моста. Её нужно добиться подборкой резисторов R1— R3.
Конденсатор С1 и резистор R6 предотвращают высокочастотную генерацию.
Транзистор VT1 и интегральный стабилизатор напряжения 7812 размещены на небольшом теплоотводе. Теоретически устройство нечувствительно к колебаниям напряжения питания, но напряжение на подстроенном резисторе R5, задающем частоту вращения, должно быть стабилизировано. По этой причине в устройстве применён интегральный стабилизатор напряжения DА1. Кроме того, встроенная в этот стабилизатор защита по току предохраняет двигатель и транзистор VТ1 от повреждения при случайном заклинивании механизма.
При испытаниях устройства выяснилось, что основное влияние на стабильность частоты вращения оказывают температурные изменения сопротивления обмотки двигателя, выполненной из медного провода, тогда как резистор R1 изготовлен из манганина. Вводить различного рода термокомпенсирующие цепи было сочтено излишним, так как обеспечить равенство температуры резистора и обмотки двигателя не представляется возможным из-за разных условий отвода от них тепла.
И наконец, испытания готового устройства неожиданно выявили, что частота вращения приборной платформы под нагрузкой падает на 5…10 %. Оказалось, что виновато проскальзывание двух резиновых пассиков, соединяющих вал двигателя с червячным редуктором. Тщательной промывкой шкивов и пассиков, промывкой и смазкой всех подшипников скольжения указанный недостаток был устранён.
В результате достигнут коэффициент стабильности лучше 0,5 % при изменении нагрузки на выходном валу редуктора в пределах от 0 до 20 Н·см, что вполне удовлетворило предъявляемым требованиям.
Несомненное достоинство предложенного решения — его простота по сравнению с устройствами аналогичной точности. Недостаток — почти двукратный перерасход мощности, рассеиваемой на дополнительном резисторе.
LITERATURE
- Шевченко В. И. и др. Кассетные магнитофоны (библиотека “Телевизионный и радиоприём. Звукотехника”, вып. 90). — М.: Связь, 1977.
- Леоненко П. Стабилизатор частоты вращения. — Радио, 1988, № 7, с. 32.
Author: В. ХИЦЕНКО, Т. ЯКОВЛЕВ, г. Санкт-Петербург
Source: Radio №4, 2015