В отличие от датчиков движения, задача оптического барьера – точно определить пересечение объектом некоторой охранной границы и зафиксировать его вход в охраняемую зону. На первый взгляд такая задача решается просто: устанавливается направленный источник инфракрасного или видимого излучения и оптической системой формируется луч, который направляется на приемник. При пересечении луча приемник выдает соответствующий сигнал. Теперь рассмотрим такую ситуацию: если объект – это, например, человек, который рядом с оптическим барьером махнул рукой, но в зону не вошел. Как это должно оцениваться? А если человек махнул рукой, а потом вошел в зону. Сколько «нарушителей» оказалось в охраняемой зоне? А если система со световым барьером должна работать, как счетчик, например, изделий, которые движутся неравномерно и вдобавок еще и с вибрацией. Как идентифицировать информацию с приемника, который будет выдавать последовательности импульсов? А если система работает совместно с системой идентификации, что, как и когда идентифицировать? Как видно, вопросов оказывается намного больше, чем ответов.
Теперь рассмотрим такую ситуацию: если объект – это, например, человек, который рядом с оптическим барьером махнул рукой, но в зону не вошел. Как это должно оцениваться? А если человек махнул рукой, а потом вошел в зону. Сколько «нарушителей» оказалось в охраняемой зоне? А если система со световым барьером должна работать, как счетчик, например, изделий, которые движутся неравномерно и вдобавок еще и с вибрацией. Как идентифицировать информацию с приемника, который будет выдавать последовательности импульсов? А если система работает совместно с системой идентификации, что, как и когда идентифицировать? Как видно, вопросов оказывается намного больше, чем ответов.
Автору статьи в одной из разработок пришлось как раз искать ответы на все эти вопросы. Требовалось однозначно определить вход объекта в некоторую зону, при этом не учитывать прохождение барьера объектами с размерами, менее заданных. При этом надо учитывать вход в зону опознанных и неопознанных объектов. То есть вариантов событий оказывается значительно больше, чем это кратко описано в начале статьи.
Система, получившая название «Счетчик объектов», предназначена для подсчета хаотически движущихся объектов с условием их идентификации. То есть она позволяет посчитать общее количество объектов, пересекших некоторую зону, и отдельно число идентифицированных по некоторым признакам объектов в этом количестве. Область применение счетчика – это системы учета и контроля, системы безопасности. Основа системы – это два особым образом расположенных оптических датчика. Принцип их расположения показан на Figur 1.
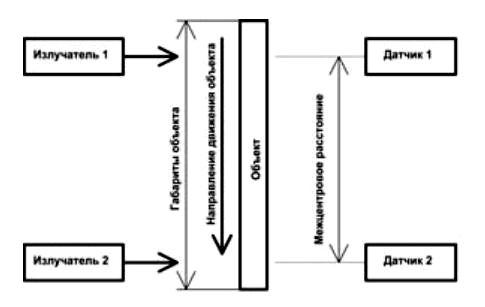
Рис. 1
Суть идеи (впервые в сокращенном варианте была опубликована в [1]) в том, что объект в ходе своего перемещения должен на каком-то этапе одновременно перекрыть сразу два датчика, естественно, что при этом датчики буду перекрываться и открываться поочередно. Это позволяет обеспечить различную реакцию системы на крупные (соответствующие критериям Figur 1) и реакцию на мелкие объекты (не соответствующие критериям Figur 1). То есть, например, движением руки такую систему в заблуждение не введешь. Сам объект может многократно делать попытки входа в зону обнаружения и выхода из нее, то есть перемещаться туда-сюда. Повторный его учет может быть только в случае, если он прошел полностью зону контроля, из нее вышел (полностью ее покинул) и вошел туда вновь. Поскольку датчики разнесены и могут быть скрытно расположены, то определить, как обмануть такую систему, к тому же без знания алгоритма ее работы, будет сложно. Датчики могут работать как с раздельными излучателями, так и в ряде случаев с одним общим. В первой практической системе использовались датчики на основе фотоприемников от оптических прерывателей H22LOI [2] (их собственный излучающий диод удалялся) с отдельно установленным внешним ИК излучателем. Оптический прерыватель H22LOI представляет собой чувствительный фотоприемник с триггером Шмитта, а его выход – ключ с открытым коллектором. В режиме засветки H22LOI (именно этого варианта исполнения, имеются и иные варианты исполнения прерывателей в этом семействе) внешним лучом выходной ключ открыт, а в режиме его отсутствия – разомкнут.
Betrieb
Схема оптического барьера показана на Figur 2. Устройство выполнено на двух ИМС, которые сконфигурированы в три триггера (DD1-2, DD1-3; DD2-1; DD2-2) с простой управляющей логикой. Поскольку алгоритм работы устройства довольно сложный и разветвленный, то его описание заняло бы много места. Поэтому рассмотрим только основные его моменты.
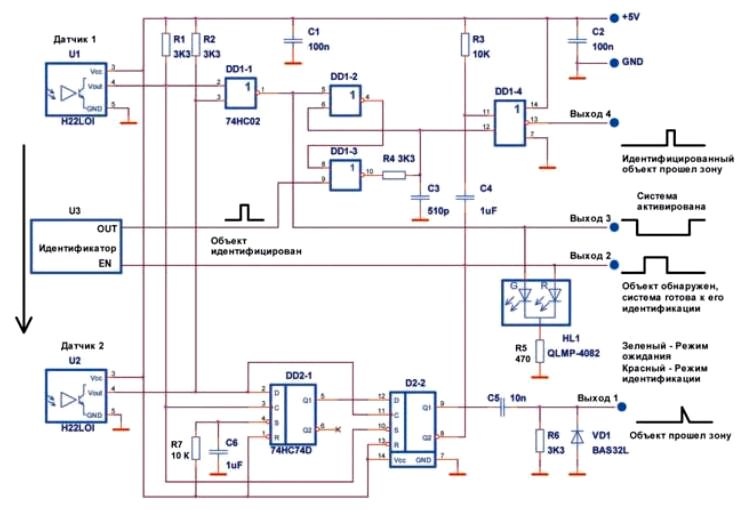
Fig. 2
В начальный момент времени, когда объект еще не вошел в зону действия системы, лучи излучателей светового барьера засвечивают датчики (U1, U2), и на их выходах присутствует уровни, соответствующие лог. «0». Соответственно, на выходе элемента «ИЛИ-HE» (DD1-1) устанавливается уровень лог. «1», который блокирует RS-триггер на элементах DD1-2, DD1-3 и принудительно устанавливает его в состояние лог. «1» на выводе 10 DD1-3. Эта лог. «1», в свою очередь, установит уровень лог. «0» на выходе элемента DD1-4 («Выход 4»). Индикатор HL1 светится зеленым. Это указывает на то, что система находится в режиме ожидания.
Как только объект входит в зону первого датчика, он перекрывает световой луч, и на выходе датчика 1 устанавливается уровень лог. «1». Выход DD1-1 переходит в состояние лог. «0», и индикатор HL1 гаснет – система активирована (состояние «Выхода 3» меняется с лог. «1» на лог. «0»). Изменение состояния датчика 1 вызывает переключение триггера DD2-1 (по переднему фронту) и принудительно устанавливает триггер DD2-2 в состояние лог. «1» на выходе Q1. Соответственно, его инверсный выход Q2 устанавливается в состояние лог. «1». При этом загорается красный светодиод индикатора HL1, сигнализируя о том, что система перешла в режим идентификации объекта, в этом режиме идентификатор получает разрешение на работу по входу EN (enable). Внешнее исполнительное устройство получает команду «Объект обнаружен, система готова к его идентификации», на «Выходе 2» состояние меняется с лог. «0» на лог. «1». Как только объект перекроет и второй датчик, на выходе элемента DD1-1 установится уровень лог. «0», тем самым, RS- триггер на элементах DD1-2, DD1-3 будет разблокирован.
Если объект успешно идентифицирован, то идентификатор выдаст лог. «1», тем самым, упомянутый RS-триггер меняет свое состояние с лог. «1» на лог. «0» (имеется в виду цепь, подключенная к выводу 12 DD1-4). Если объект не был успешно идентифицирован, то состояние RS-триггера не изменяется. Как только объект выйдет из зоны первого датчика, на его выходе опять установится уровень лог. «0», триггер на DD2-1 будет принудительно переведен в состояние лог. «1» на выходе Q1, а выход Q2 поменяет свое состояние с лог. «1» на лог. «0». Если идентификация объекта была успешной (RS-триггер на элементах DD1-2, DD1-3 был переведен в низкий логический уровень), то на «Выходе 4» появится короткий импульс, свидетельствующий о том, что идентифицированный объект прошел зону. В противном случае, импульс на этом выходе будет отсутствовать, и его состояние так и останется равным лог. «0». Но в любом случае на «Выходе 1» схема выдаст короткий импульс, свидетельствующий о том, что некоторый объект полностью прошел защитный световой барьер. По этому импульсу осуществляется подача сигнала тревоги или подсчет входа в зону идентифицированных объектов. После этого схема опять перейдет в режим ожидания и включится зеленый светодиод индикатора HL1 (режим ожидания).
Элементы R4, С3 улучшают работу RS-триггера на DD1-2, DD1-3 и обеспечивают его начальную установку. Элементы R7, С6 обеспечивают начальную установку триггера DD2-1 при подаче напряжения питания.
Индикатор HL1 используется опционно и позволяет контролировать работу системы. Резисторы в цепи коллекторов выходных ключей R1, R2 датчиков могут быть увеличены до 10 кОм. Блок идентификации может иметь собственный выход (на Figur 2 не показан).
Временная диаграмма работы устройства показана на рис.3. На диаграмме показаны два основных режима работы устройства. В зоне «А» показан режим для случая пересечения барьера идентифицированным объектом. В зоне «В» – режим работы при пересечении барьера не идентифицированным объектом.
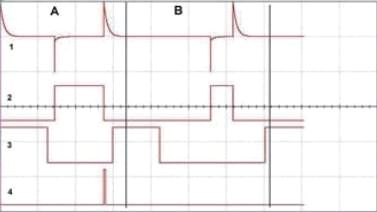
Fig. 3,ru
Осциллограмма 1 – это импульсы, позволяющие осуществить подсчет общего числа объектов, пересекших световой барьер.
Осциллограмма 2 – режим обнаружения объекта (высокий уровень).
Осциллограмма 3 – активация системы и ее готовность к идентификации объекта (низкий уровень).

Лазерный модуль типа HLDPM10-650-3
Осциллограмма 4 – показывает импульс, указывающий, что барьер пересек идентифицированный объект.
В качестве излучателей могут использоваться недорогие малогабаритные лазерные модули типа HLDPM10-650-3 (см. фото) с регулировкой луча (на плате модуля имеется специальный подстроенный резистор). Эти модули могут формировать луч с пятном диаметром 1…2 мм на довольно большом расстоянии, поэтому можно упростить общую конструкцию системы. Датчик и излучатель устанавливают вместе, а возврат луча на датчик осуществляют, используя отражатель. Для подключения лазерного модуля и получения нужного пятна светового луча используется несложное добавочное устройство, показанное на Figur 4.

Fig. 4,ru
Напряжение, подаваемое на лазеры (VD2 на Figur 4), а следовательно, и их рабочий ток, задаются резисторами R1, R2. Для ИМС LM317 его можно рассчитать по формуле UO=1,25·(1+R2/R1) [3].
Необходимо помнить, что рабочее напряжение указанного лазерного модуля составляет 3 В. Если есть необходимость в дополнительной регулировке тока лазерного модуля, то резистор R2 заменяют последовательно включенными постоянными и подстроечными резисторами. Индикатор HL2 – опционный. Он очень удобен при выставлении оптического барьера на объекте, так как легко позволяет обнаружить попадание луча излучателя на датчик.
Детальный алгоритм работы этого несложного устройства приведен в Tabelle 1 und табл.2. Стрелками показано движение объекта. Как видно, положительная реакция системы есть только в одном случае – барьер пройден, объект идентифицирован. Как видно из таблиц, никаких лишних обнаружений система не дает.

Таблица 1

Таблица 2
| высокий логический уровень (лог.1); | |
| низкий логический уровень (лог.0); | |
| одиночные импульсы высокого логического уровня; | |
| датчики; | |
| объект и направление его движения. |
В качестве идентификатора могут использоваться любые системы: устройства RFID, считыватели магнитных или штрихкодов и т.п. Первый вариант устройства с ИК излучателями использовался для идентификации прохождения барьера с распознаванием пластиковых карт. Эти устройства без единого сбоя успешно эксплуатируются с 2007 года. Системы с лазерным модулем используются с 2010 года.
Естественно, что для надежной работы системы должны быть приняты соответствующие меры, предотвращающие внешнюю засветку датчиков (приемников).
Fachliteratur
- Vladimir Rentyuk. Count objects as they pass by // – 2010. – July 15.
- H22L Series OPTOLOGIC® Optical Interrupter Switch, Fairchild Semiconductor Corp., May 2007.
- LM117/LM317A/LM317 3-Terminal Adjustable Regulator, National Semiconductor Corp. May 1996.
Autor: Владимир Рентюк, г. Запорожье