Многие радиолюбители для сверления отверстий в печатных платах пользуются ручными микродрелями с коллекторными электродвигателями, питаемыми постоянным напряжением 12…27 В. Предлагаемое устройство управления такой дрелью обеспечивает все необходимые режимы её работы, просто в изготовлении и не требует налаживания.
Тема удобства работы с микродрелью регулярно поднимается в различных электронных и печатных изданиях по радиолюбительской тематике. При этом абсолютное большинство авторов считает необходимым и достаточным, чтобы микродрель плавно стартовала в момент включения питания, на холостом ходе (в отсутствие нагрузки на вал) работала с пониженной частотой вращения, автоматически увеличивала частоту вращения до максимальной с началом сверления и автоматически снижала её до частоты холостого хода по его завершении. Блок управления дрелью должен быть простым и легко повторяемым.
Практически ежегодно на страницах журнала “Радио” появляются статьи [1 — 3], авторы которых предлагают устройства различной сложности, придающие микродрели указанные полезные свойства. Однако в большинстве своём они построены по аналоговому принципу, ввиду чего к характеристикам отдельных компонентов предъявляются довольно жёсткие требования, ухудшается повторяемость конструкции и усложняется налаживание. Работа регулирующего транзистора в активном режиме требует отводить от него много тепла, что увеличивает габариты устройства.
В последние годы радиолюбители начали разрабатывать подобные устройства и на базе цифровой техники, которые лишены недостатков, присущих аналоговым собратьям. Примером может служить блок управления микродрелью, описанный в [4], обладающий хорошей функциональностью, однако не лишённый ряда недостатков. Схема блока слишком сложна для устройств такого назначения. Необходима точная подборка ряда компонентов. В память микроконтроллера при его программировании необходимо записать точные значения сопротивления нескольких резисторов блока и параметры электродвигателя. Всё это может затруднить повторение конструкции, особенно начинающими радиолюбителями.
Предлагаемое устройство управления микродрелью построено, как и описанное в [4], на микроконтроллере, однако существенно проще в изготовлении и налаживании, не требует точной подборки компонентов и вместе с тем удовлетворяет всем перечисленным выше требованиям. Его легко адаптировать к микродрелям с электродвигателями, отличающимися от применённого автором как номинальным напряжением питания, так и мощностью.
Zeigt ein Diagramm einer Vorrichtung auf Abb. 1. При холостом ходе электродвигатель микродрели М1 питается импульсным напряжением. Частота следования импульсов — около 1 кГц, а их длительность (и, следовательно, среднее значение питающего двигатель напряжения) программа микроконтроллера DD1 позволяет изменять в широких пределах. Импульсы, сформированные микроконтроллером на выводе 17, усиливают для подачи на двигатель М1 транзисторы VT1 и VT2. Вал двигателя вращается тем быстрее, чем больше эффективное значение питающего двигатель напряжения, которое у последовательности однополярных прямоугольных импульсов совпадает со средним.

Рис. 1
Во время сверления микроконтроллер устанавливает на выводе 17 постоянный высокий уровень напряжения. Поэтому транзистор VT2 открыт, а на двигатель М1 поступает полное постоянное напряжение питания.
Ток, протекающий через двигатель, вызывает падение напряжения на резисторах обратной связи R9 и
R10. Импульсы, снимаемые с этих резисторов, пиковый детектор на диоде VD1 с запоминающим конденсатором С2 превращает в равное их амплитуде постоянное напряжение. С конденсатора С2 оно поступает на вывод 24 микроконтроллера — вход одного из каналов его АЦП. Программа микроконтроллера анализирует значение этого напряжения и принимает решение о необходимом режиме работы двигателя.
Чем больше постоянная времени разрядки конденсатора С2, тем лучше он устраняет импульсную составляющую напряжения обратной связи, однако тем медленнее устройство реагирует на уменьшение тока двигателя по окончании сверления. В рассматриваемом случае эта постоянная времени равна приблизительно 15…20 мс и зависит в основном от тока утечки закрытого диода VD1.
Von рис. 2 в несколько упрощённом виде изображён график изменения напряжения на конденсаторе С2 (на входе АЦП микроконтроллера). Импульсы тока протекают через двигатель и включённые с ним последовательно резисторы обратной связи по току R9 и R10. Импульсы напряжения, падающего на этих резисторах, заряжают конденсатор С2 до напряжения U1. Следует заметить, что на холостом ходу это напряжение довольно значительно (около 1 В). Это обусловлено тем, что скорость вращения ротора двигателя в режиме холостого хода установлена небольшой. Следовательно, незначительна и пропорциональная частоте вращения противоЭДС двигателя, в результате чего велика амплитуда текущих через него импульсов тока.
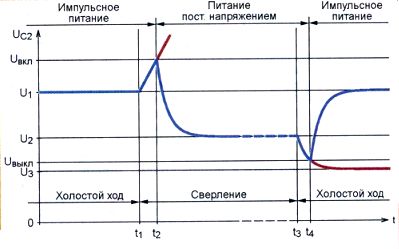
Fig. 2
В момент времени t1 начинается процесс сверления. С ростом нагрузки на сверло частота вращения уменьшается, а вместе с ней и противоЭДС двигателя. Амплитуда импульсов тока растёт, а с ним и напряжение на конденсаторе С2. Программа сравнивает его с Ueinschließlich — заданным порогом включения режима сверления.
В момент времени t2, как только пороговый уровень будет превышен, она увеличит до максимума коэффициент заполнения формируемых импульсов. Это превратит импульсное напряжение питания двигателя в постоянное, практически равное напряжению источника питания. Частота вращения ротора станет быстро расти, а ток двигателя и напряжение на конденсаторе С2 уменьшатся вследствие роста противоЭДС. По завершении этого процесса напряжение на конденсаторе С2 станет равным U2, значительно меньшим U1.
В момент времени t3 (по завершении сверления) нагрузка на вал двигателя резко уменьшается, вследствие чего частота вращения его ротора увеличивается, а напряжение на входе АЦП вследствие дальнейшего роста противоЭДС двигателя уменьшается, стремясь к установившемуся значению U3.
Однако в момент времени t4 оно сравняется с UWeg — порогом выключения режима сверления. Программа вновь сделает напряжение питания
двигателя импульсным, частота вращения ротора двигателя упадёт, а напряжение на конденсаторе С2 возрастёт до U1. Теперь дрель снова работает в режиме холостого хода и готова к следующему циклу сверления.
Расскажем о том, откуда программа получает информацию о заданной частоте вращения в режиме холостого хода и значения порогов. В ней предусмотрен режим установки параметров, в который входят нажатием на кнопку SB1 и её удержанием нажатой не менее секунды.
Не отпуская кнопку, желательную частоту вращения ротора двигателя при холостом ходе устанавливают подстроечным резистором R3. Эта процедура выполняется в реальном масштабе времени. Ещё один канал АЦП микроконтроллера преобразует напряжение с движка подстроенного резистора R3 в код, который задаёт коэффициент заполнения питающих двигатель импульсов, что изменяет частоту вращения его ротора. Установив нужную частоту, кнопку SB1 отпускают. Программа записывает выходной код АЦП в EEPROM и переходит к вычислению порогов Ueinschließlich und UWeg„.
Так как текущее значение частоты вращения двигателя после отпускания кнопки SB1 соответствует холостому ходу, программа измеряет напряжение U1 и вычисляет порог включения режима сверления:
Ineinschließlich =1,17 U1.
Полученное значение она записывает в EEPROM.
Далее программа увеличивает частоту вращения двигателя, плавно доводя коэффициент заполнения формируемой импульсной последовательности до 100 %, после чего замеряет напряжение U3 и вычисляет порог выключения режима сверления:
InWeg = 1,1 U3.
Полученное значение она также записывает в EEPROM.
На этом установка параметров завершается, и происходит повторный старт управляющей программы. На её первых шагах происходит выборка из EEPROM трёх упомянутых выше значений для их дальнейшего использования в программе. Затем частота вращения ротора двигателя плавно увеличивается от нуля до заданной для холостого хода.
Таким образом, значения порогов не задаются пользователем, а формируются самой программой с учётом реальных характеристик двигателя, значений питающего напряжения и сопротивления обратной связи. Иначе говоря, устройство самонастраивается под конкретные условия и поэтому не требует точной подборки сопротивления обратной связи в отличие от ряда подобных конструкций.
Повторная установка параметров потребуется лишь при необходимости изменить прежнюю частоту вращения ротора двигателя на холостом ходу либо при замене двигателя или микродрели целиком.
Элементы устройства размещены на односторонней печатной плате размерами 44×45 мм, изображённой на Abbildung. 3.

Fig. 3,ru
Применены в основном элементы для поверхностного монтажа — конденсаторы и постоянные резисторы типоразмера 1206 с допустимым отклонением ёмкости или сопротивления от номинала до ±10 %. Выводы кнопки SB1 и подстроенного резистора R3 монтируют в отверстия. Для микроконтроллера DD1 на плате установлена панель SCS-28, из которой удалены почти все неиспользуемые гнёзда. До установки микроконтроллера в панель коды из файла Drel.hex должны быть загружены в его программную память, а конфигурация запрограммирована согласно таблице.
| Разряд | Сост. | Разряд | Сост. |
| RSTDISBL | 1 | BODLEVEL | 1 |
| WDTON | 1 | BODEN | 1 |
| SPIEN | 0 | SUT1 | 0 |
| СКОРТ | 1 | SUT0 | 1 |
| EESAVE | 1 | CKSEL3 | 0 |
| BOOTSZ1 | 0 | CKSEL2 | 1 |
| BOOTSZO | 0 | CKSEL1 | 0 |
| BOOTRST | 1 | CKSEL0 | 0 . |
Возможности транзистора IRFR9024N достаточны для управления электродвигателем с потребляемым под нагрузкой током до 2…3 А (значительно мощнее применённого автором двигателя ДПМ-30), но с увеличением мощности двигателя значительно возрастёт и мощность, рассеиваемая резисторами R9 и R10. Размеры посадочных мест для них на печатной плате с учётом этой возможности выбраны такими, что позволяют устанавливать резисторы типоразмеров вплоть до 2512.
Резисторы обратной связи — единственные элементы,сопротивление которых зависит от мощности электродвигателя микродрели. Падение напряжения на них не должно выходить за пределы допустимого для АЦП микроконтроллера интервала. Рассчитать это сопротивление можно по формуле
R9 = R10 = U3/2·I0
wo U3 (см. рис. 2) — суммарное падение напряжения на резисторах обратной связи при номинальном напряжении питания и ненагруженном двигателе; I0 — ток двигателя при тех же условиях. Принимая U3 равным 0,2…0,3 В, получим
R9=R10=0,1…0,15/I0
Каждый резистор должен выдерживать мощность не менее
P = R·Ip2,
где R=R9=R10; lp — ток нагруженного двигателя (в процессе сверления).
Если значение тока указать в амперах, то сопротивление будет получено в омах, а мощность — в ваттах.
Питать микродрель с описанным устройством можно от стабилизированного или нестабилизированного источника постоянного напряжения с конденсатором большой ёмкости, подключённым параллельно выходу. В авторском варианте использован нестабилизированный источник напряжения 24 В с конденсатором ёмкостью 1000 мкФ на выходе.
Питающее напряжение с учётом пульсаций не должно превышать 30 В ни при каких обстоятельствах. Амплитуда импульсов на затворе транзистора VT2 должна лежать в пределах 10…15 В.
Транзистор ВС847С можно заменить любым маломощным биполярным транзистором структуры n-p-n с допустимым напряжением коллектор—эмиттер не менее 35 В. Такому же требованию должно удовлетворять допустимое напряжение сток—исток полевого транзистора, подбираемого для замены IRFR9024N. Кроме того, он должен иметь максимальный ток стока не менее 5 А и сопротивление открытого канала не более 0,17 Ом (чем меньше, тем лучше). Диод SS12 можно заменить на SS14—SS16.
Сложнее всего обстоит дело с подбором замены для интегрального стабилизатора LP2950ACDT-5.0. Хотя потребляемый от него ток не превышает 10 мА, однако почти все распространённые микросхемы маломощных стабилизаторов напряжения с выходным напряжением 5 В не допускают подавать на них входное напряжение выше 15…20 В, а требуется стабилизатор с
допустимым входным напряжением не менее 30 В. При отсутствии микросхемы, удовлетворяющей этому требованию, рекомендуется применить две ступени стабилизации, соединив последовательно микросхемы 78L12 и 78L05, как показано на Abb. 4.
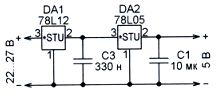
Fig. 4,ru
Такой составной стабилизатор не потребует увеличения габаритов печатной платы, однако потребует изменения топологии проводников на ней. Следует иметь в виду, что и замена других элементов их аналогами тоже может потребовать переделки платы.
Предлагаемое устройство можно использовать и для управления микродрелью с другим напряжением питания, например 12 В. Единственное обязательное изменение для его адаптации к такому напряжению — замена резистора R8 перемычкой. Это необходимо, чтобы увеличить амплитуду открывающих импульсов на затворе транзистора VT2. Если этого не сделать, он может перегреться и выйти из строя.
Других обязательных изменений нет, но можно, например, использовать в качестве DA1 один из распространённых интегральных стабилизаторов напряжения +5 В с предельным входным напряжением 15 В. Приведённые выше требования к предельному напряжению транзисторов тоже снижаются вдвое, что расширяет круг возможных замен.
Адаптация устройства к ещё меньшему напряжению питания (6…9 В) потребует применения в качестве VT2 полевого транзистора, надёжно открывающегося при напряжении затвор- исток, не превышающем по абсолютному значению UPit-1 В, где UPit — напряжение питания устройства.
Несколько слов о том, необходимо ли предусматривать возможность регулировки частоты вращения сверла на холостом ходу. Это должна быть минимальная частота, с которой оно вращается устойчиво, не останавливаясь при резком увеличении механической нагрузки с началом сверления.
В аналоговых устройствах управления электродрелью наличие такого регулятора оправдано. В них частота вращения на холостом ходу может существенно отличаться от образца к образцу при установке регулятора в одинаковое положение. Это связано с существенным влиянием на неё разброса параметров элементов устройства. Более того, частота холостого хода может существенно “плавать” при изменении температуры.
В микроконтроллерном регуляторе такое влияние практически отсутствует. Становится заманчивым заранее определить оптимальную частоту вращения и задать её в программе. Тогда органы регулировки частоты и связанные с ними фрагменты программы микроконтроллера можно будет удалить. Правда, такая программа обеспечит правильную работу только однотипных электродвигателей, под другие её придётся корректировать. Но такая корректировка потребуется только при замене электродрели на имеющую другой двигатель, что происходит далеко не каждый день. Да и сводится она к подборке всего одной константы.
Конечно, и в этом случае разброс частоты холостого хода от образца к образцу будет иметь место. Теперь он обусловлен только разбросом характеристик самих электродвигателей и весьма невелик, если речь не идёт о двигателях от детских игрушек или изъятых из каких-либо устройств после длительной эксплуатации. Автор проверял изготовленное устройство, не регулируя частоту вращения холостого хода, с четырьмя микродрелями, оснащёнными двигателями ДПМ-30 разных лет выпуска. Результат подтвердил ожидания — субъективно изменений в работе микродрелей не отмечено. Если разброс и имел место, то был крайне мал.
Устройство без регулировки частоты вращения можно собрать на печатной плате, изображённой на Abbildung. 5. По схеме оно отличается от ранее рассмотренного только отсутствием двух резисторов — постоянного R2 и подстроенного R3. Нумерация оставшихся элементов соответствует Abb. 1. Программа микроконтроллера для этого варианта носит название Drel_s.
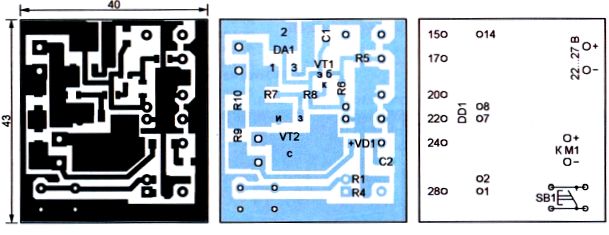
Рис. 5
При использовании этой версии программы для установки параметров необходимо нажать и удерживать в течение секунды кнопку SB1, а затем отпустить её. Далее программа выполнит все необходимые действия самостоятельно.
Частоту холостого хода в программе задаёт оператор присваивания Wxx=60, помеченный меткой 100 и находящийся в начальной части исходного текста программы (файла Drel_s.bas). Число в правой части оператора можно изменять от 0 (ротор не вращается) до 255 (максимальная частота
вращения). После любого изменения в исходном тексте программу необходимо оттранслировать заново и загрузить в микроконтроллер коды из полученного НЕХ-файла.
Программу Drel_s можно загрузить и в микроконтроллер первого варианта устройства. В этом случае подстроечный резистор R3 действовать не будет.
Конфигурация микроконтроллера для работы с программой Drel_s не отличается от предназначенной для работы с программой Drel.
Herunterladen дополнительные файлы.
LITERATUR
- Саглаев С. Удобная микродрель. — Радио, 2009, № 9, с.
- Глибин С. Приставка для управления микродрелью. — Радио, 2010, № 7, с. 30.
- Гуреев С. Устройство питания сверлилки. — Радио, 2011, № 5, с. 33.
- Дымов А. Блок управления микродрелью. — Радио, 2013, № 4, с. 24.
Autor: A. SAVCHENKO, Siedlung selenogradski MOSKOVSKAYA obl.
Источник: Радио №9, 2015
Собрал данное устройство, всё работает отлично! Автору и сайту огромное спасибо за предоставленный материал. Сборку сделал на SMD компонентах, для уменьшения размеров девайса. Кому интересно могу дать “LAY6”
Здравствуйте Тимофей.
Добавьте lay .
Спасибо.
Если бы я знал как и куда его добавить….)))) Если Вы дадите адрес, я скину на него, а там сами выложите.
Я извиняюсь, разобрался где что. Привык, что “обратная связь” где нибудь сверху находится.
Тимофей, печатка будет ?, я не нашел, если Вы её прикрепили.
мой mail: vicfamiy@mail.ru
Спасибо.
Тимофей, здравствуйте!
Очень понравилась конструкция, хочу попробовать ее в работе. Можете отправить мне lay на почту alehd@bk.ru ?
Заранее благодарен, Олег.
Тимофей, здравствуйте!Хотелось повторить ваш проект,если можно в lay.отправить пожалуйста мне файл платы на адрес: sacha_pozidaev@bk.ru
Добрый день Тимофей. Скиньте пжл на yardval@mail.ru печатку, буду очень признателен.
Поделитесь печаткой, пожалуйста! eratv11@gmail.com
Вот фото устройства. Батарейка “АА”
Размеры платы всего 35х25.
Тимофей, если не трудно можете и мне скинуть файл платы. Спасибо evgeny.tokarev@rambler.ru
У меня ещё вопрос. Будет ли схема работать с мотором от шурупаверта?
Привет. На счёт мотора от шурика не пробовал, но скорее всего работать будет, только придётся поставить мощнее MOSFET и “поиграть” с R9-R10 ну и конечно питание под мотор другое.
Уважаемый Тимофей! Очень прошу отправить мне файл платы на адрес: remlen_y@mail.ru.
Спасибо!
evgenyevgeny81
Спасибо! Файл получен.
Тимофей, здравствуйте!
Очень хочу попробовать собрать ваш вариант устройства управления микродрелью и посмотреть ее в работе. Можете отправить мне lay на почту personals67@mail.ru ? Эдуард, Новосибирск.
Тимофей, здравствуйте!Хотелось повторить ваш проект,если не сложно пожалуйста отправте в lay файл платы на адрес: sacha_pozidaev@bk.ru
Здравствуйте! Файл выслал. С первого раза (от 09.04.) оповещения о Вашем запросе не было, так что извиняйте, а проект это не мой, моя только плата в smd исполнении. Удачных повторений! 🙂
Доброго времени суток Тимофей! давно гоняюсь за таким устройством очень необходимая вещь для меня. вышлите пожалуйста на почту файл с печаткой в lay6 буду примного благодарен мой ящик leon741@rambler.ru. примного благодарен заранее…если в чем то нужен будет совет пишите чем смогу тем помогу, я занимаюсь ремонтом компов, модернизацией и изготовлением разных приспособ…и данная схема мне просто необходима….буду ждать.
Тимофей! Спасибо файл получил,буду пробовать.
Интересно конечно но атмегу8 для этого это как с пушки по воробьям стрелять, да и есть в сети схема с этими функциями на двух транзисторах
Доброго времени суток Тимофей! Интересный проект. Скиньте пожалуйста Вашу версию печатки на почту” valmos1973@mail.ru“. Спасибо!
Очень много просьб с отправкой файла платы в smd исполнении, т.к. не имею понятия как сюда засунуть “LAY” выкладываю картинку платы. Для кого не понятно как из картинки сделать полноценный lay файл, смотрим это видео от АКА ( не реклама) в качестве обучающего материала: (https://www.youtube.com/watch?v=ED2Giv7ElWM&t=0s&list=LLcJ74fK7O_x8O5GQSZFNykQ&index=3) Я надеюсь, что уважаемый АКА не будет против.)))
А можно точные размеры платы?
День добрый! Собрал ваше устройство. При первом включении ротор двигателя вращался на холостом ходу, но обороты не регулировались при вращении построечника, вернее, регулировались, но резко до нуля, а не плавно. Затем без всяких причин двигатель остановился и всё, никакие регулировки ни к чему не приводили. Все компоненты исправны. Фьюзы установлены согласно вашей таблицы. МК выпаивал повторно и всё проверял через Дудку – всё в норме. Подскажите в чем может быть дело. Я понимаю, что прошло много времени со дня вашей публикации, но тем ни менее, надеюсь, что вы увидите моё сообщение. Спасибо.