В настоящее время наряду с асинхронными и коллекторными двигателями переменного напряжения в быту и на производстве широко используются коллекторные двигатели постоянного тока. Их преимущество обусловлено, в первую очередь, простотой схемы управления, так как здесь нет необходимости использовать дорогостоящие частотные преобразователи.
Eine kleine DC-Motor Kommutator
Для стабилизации частоты вращения таких двигателей можно обойтись без громоздких и сложных в обслуживании систем на основе датчиков положения ротора и тахогенераторов. Кроме того, данные двигатели обеспечивают значительный крутящий момент, при возможности регулирования частоты вращения ротора в широких пределах (от максимальной рабочей частоты, превышающей у некоторых двигателей 5000 об/мин, почти до нуля).
По принципу действия схемы управления коллекторными двигателями постоянного тока можно разделить на две основные группы:
- схемы с широтно-импульсным регулированием частоты вращения ротора двигателя;
- схемы с фазовым регулированием частоты вращения ротора двигателя.
Принцип действия, заложенный в первую из них, обеспечивает приемлемые параметры. Схема работает на частотах 1…20 кГц, в качестве ключевых элементов здесь используются мощные транзисторы. Однако на практике данная схема не обеспечивает должной надежности из-за неустойчивой работы транзисторов при больших импульсных токах. При перегрузках часто выходят из строя дорогостоящие силовые транзисторы.
Значительно более надежной зарекомендовала себя методика с фазовым управлением частотой вращения, где в качестве регулирующих элементов используются тиристоры. Однако промышленные схемы, в которых используется указанный принцип, достаточно громоздки. В результате анализа некоторых из указанных схем выяснилось, что можно добиться значительного их упрощения без всякого ухудшения технических характеристик устройства. Стабильность частоты вращения двигателя в схеме, показанной на Figur 1, не уступает большинству дорогостоящих импортных ШИМ регуляторов, а по надежности значительно превосходит их. Схема предназначена для регулировки оборотов коллекторных двигателей типа КПА, КПК или аналогичных мощностью от 90 до 250 Вт и номинальным напряжением 12…48 В. На практике в данной схеме практически не было случаев выхода из строя полупроводниковых элементов. Даже при установке плавкого предохранителя FU1 на ток, значительно превышающий номинальный в случае перегрузки или заклинивания двигателя, выгорал 5-ваттный резистивный шунт R2. Все остальные элементы схемы при этом сохраняли работоспособность.
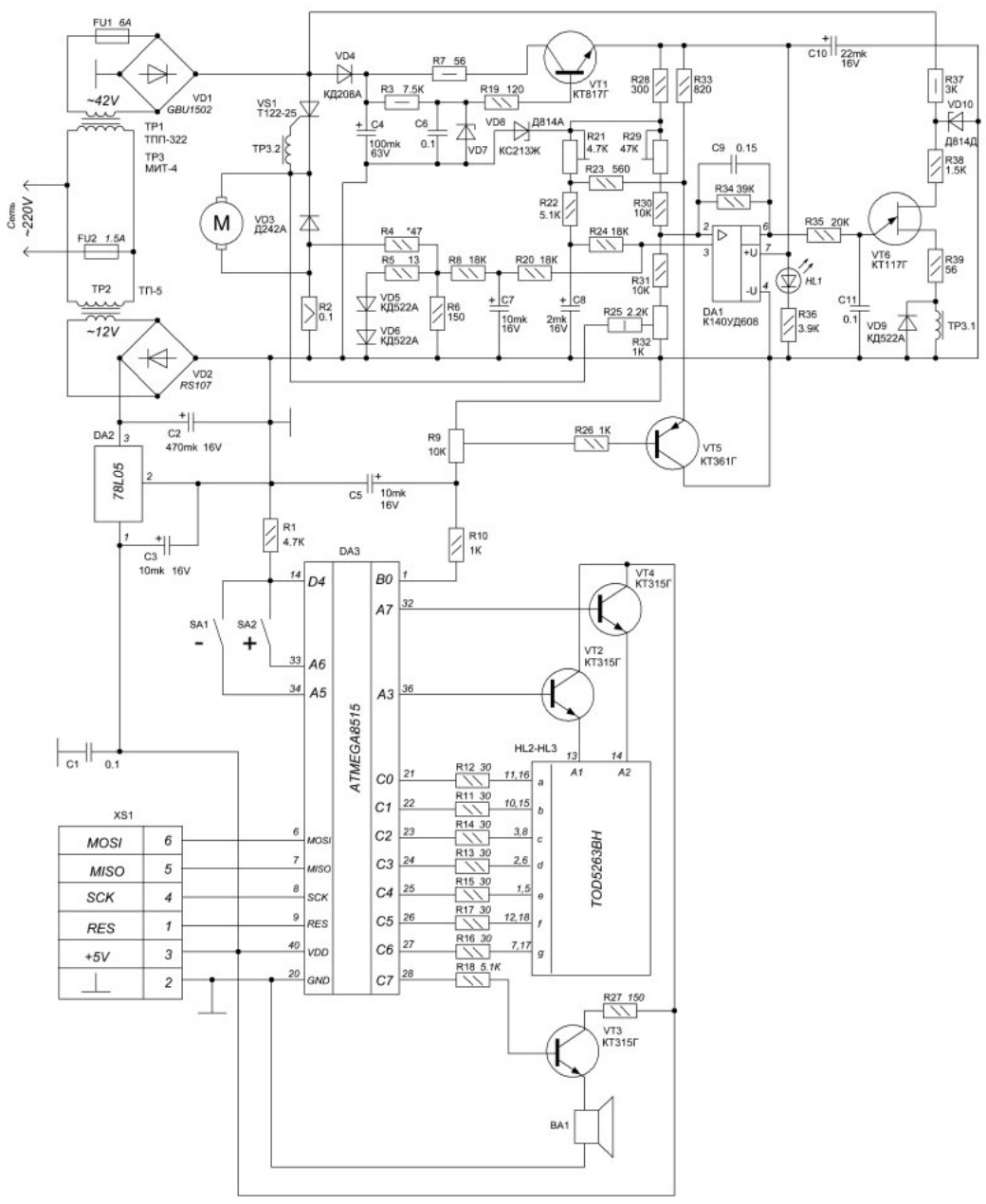
Рис. 1
Как уже отмечалось выше, в основу работы схемы, показанной на Figur 1, положен принцип фазовой регулировки частоты вращения коллекторного двигателя с использованием обратных связей по току и напряжению. Таким образом, указанная схема позволяет обеспечить стабильные обороты двигателя при значительных колебаниях нагрузки на валу, а также питающего напряжения. Можно реализовать режим, когда при увеличении нагрузки обороты двигателя увеличиваются.
В описываемой конструкции реализовано микропроцессорное управление схемой, однако можно использовать и аналоговое регулирование, с помощью переменного резистора.
На микроконтроллере ATMEGA8515 реализованы следующие функции:
- задание частоты вращения двигателя с помощью кнопок «-» и «+»;
- отображение установленных значений на двухразрядном семисегментном цифровом индикаторе (значения от 00 до 99);
- автоматическое сохранение заданных настроек в энергонезависимую память;
- проигрывание мелодии при включении питания;
- формирование звуковых сигналов при нажатии кнопок;
- автоповтор при длительном удержании кнопок задания.
Выходное напряжение для управления частотой вращения двигателя формируется микроконтроллерной частью схемы посредством широтно-импульсной модуляции (ШИМ). В устройстве, показанном на Figur 1, задействован один канал регулирования, однако благодаря программной реализации ШИМ, при необходимости, число каналов регулирования здесь может быть увеличено до пяти.
Для питания блока стабилизации и самого двигателя использован мощный силовой трансформатор ТР1 с номинальным выходным напряжением 24…48 В и мощностью 200…500 Вт, в зависимости от мощности используемого двигателя. Следует помнить, что при перегрузках коллекторных двигателей их ток может превышать номинальный в несколько раз. Этим следует руководствоваться при выборе трансформатора, он должен иметь как минимум двукратный запас по мощности.
Учитывая, что при перегрузках двигателя напряжение на трансформаторе ТР1 может просаживаться, а пульсации значительно возрастать, с целью повышения надежности контроллерная часть устройства запитана от отдельного блока питания на трансформаторе ТР2 с номинальным выходным напряжением 12… 15 В и мощностью около 5 Вт. Напряжение, снимаемое с этого трансформатора, выпрямляется диодным мостом VD2 и поступает на интегральный стабилизатор DA2, обеспечивающий выходное напряжение 5 В, необходимое для питания контроллера DA3.
Силовая часть схемы питается выпрямленным пульсирующим напряжением 24…48 В, снимаемым с диодного моста VD1. Стабилизированное сглаженное напряжение для питания ОУ DA1 формируется стабилизатором, собранным на транзисторе VT1, резисторах R3, R7, R19, конденсаторах С4, С6, С10 и стабилитроне VD7. Диод VD4 разделяет пульсирующее напряжение, необходимое для работы тиристора VS1, и сглаженное – стабилизатора напряжения. Светодиод HL1 служит для индикации подачи напряжения питания и работоспособности стабилизатора.
Опорное напряжение для цепи задания скорости вращения двигателя формирует стабилитрон VD8. Напряжение, задающее скорость вращения двигателя, снимается с резистора R21 и через фильтр на элементах R22, С8, R24 поступает на неинвертирующий вход ОУ DA1 (вывод 3), где складывается с напряжением обратной связи по току. Данное напряжение снимается с резистивного шунта R2 и через делитель на резисторах R4, R6 и фильтр R8, С7, R20 поступает на указанный вход ОУ. Элементы VD5, VD6, R5 служат для ограничения напряжения токовой обратной связи до необходимого уровня.
На инвертирующем входе 2 ОУ DA1 напряжение, снимаемое через резисторы R25, R31, R32 с якоря двигателя М, суммируется с опорным напряжением, поступающим со стабилитрона VD8 через резисторы R29, R30.
Напряжение с выхода интегратора DA1 управляет формирователем импульсов на однопереходном транзисторе VT6, определяющем угол открытия тиристора VS1. Таким образом осуществляется фазовое регулирование частоты вращения ротора двигателя с обратными связями по току и напряжению. Для управления тиристором VS1, используется импульсный трансформатор ТРЗ, включенный в цепи формирователя импульсов (C11, VT6, R38, R39,VD9).
После сборки устройства и проверки правильности монтажа необходимо через разъем XS1 подключить к схеме программатор и прошить контроллер DA3.
Фьюзы контроллера настраивают на работу от внутреннего RC-генератора частотой 8 МГц, включают детектор снижения напряжения (B0D) и устанавливают напряжение контроля – 4,3 В. Полная конфигурация фьюзов в программе CodeVisionAVR показана на Figur 2.

Рис. 2.
Passen Sie
Отладку схемы начинают с проверки работоспособности контроллерной части. Для этого, не вставляя предохранитель FU1, подключают устройство к сети, при этом на индикаторах HL2-HL3 должны отобразиться нули, а в динамике ВА1 проиграться мелодия. При каждом нажатии кнопки SA2 значения на индикаторе должны увеличиваться на единицу (при нажатии на SA1 – соответственно уменьшаться), а в динамике раздаваться звуковой сигнал. При длительном удержании любой из кнопок должен начаться автоповтор. Далее проверяют работу формирователя ШИМ, для этого, подключив вольтметр в точку соединения элементов 05, R9, R10, убеждаются, что напряжение здесь плавно изменяется от 0 до 5 В (при изменении значений на индикаторах от 0 до 99 соответственно).
Перед настройкой силовой части прибора необходимо организовать стенд, позволяющий оперативно контролировать частоту вращения ротора двигателя и менять нагрузку на валу. Наиболее простым и удобным таходатчиком может служить обычная универсальная магнитная головка от кассетного магнитофона, отработавшая свой ресурс. Ее фиксируют на расстоянии нескольких миллиметров от вала двигателя. На валу надежно закрепляют (например, с помощью изоленты) небольшой кусочек магнита, чтобы он пересекал магнитный зазор головки при вращении вала двигателя. Выходные контакты головки подключают к осциллографу. Изменение нагрузки на валу для двигателей мощностью до 200 Вт можно производить, прижимая к нему кусок плотной резины. Кроме того, для настройки необходим регулируемый источник переменного напряжения 24…48 В.
Перед настройкой силовой части устройства вместо постоянного резистора R4 устанавливают подстроечный (для двигателей КПА-563, КПК-564 или аналогичных – 470 Ом при напряжении питания 42 В). Движок подстроечного резистора R9 устанавливают в среднее положение. Вставив предохранитель FU1 в гнездо, можно приступать к отладке. При включении питания на индикаторах HL2-HL3 должны отобразиться заданные ранее значения, также должен засветиться индикатор HL1, сигнализирующий о нормальной работе схемы стабилизатора.
С помощью кнопки SA1 задают нулевое напряжение на выходе формирователя ШИМ, установив значение «00». После подачи напряжения питания, подстроечным резистором R29 добиваются полной остановки якоря двигателя и отсутствия на нем напряжения. Затем, изменяя положение движка подстроечного резистора R21, добиваются начала вращения вала двигателя. Далее нажатием кнопок устанавливают на цифровом индикаторе значение «50» и, добившись устойчивого положения сигнала на экране осциллографа, нагружают вал двигателя. Изменением сопротивления резистора R4 добиваются постоянства оборотов двигателя (сигнал на экране осциллографа не должен «уплывать») при изменении нагрузки на валу. Далее выпаивают подстроечный резистор R4, измеряют установленное на нем значение сопротивления и вместо него впаивают постоянный резистор, соответствующего номинала. Желаемый диапазон регулировки оборотов двигателя, при изменении значений от «00» до «99», устанавливают подстроечным резистором R9.
Для настройки узла стабилизации по напряжению входное напряжение схемы с помощью ЛАТРА уменьшают на 10…20% и вращением подстроечного резистора R25 добиваются сохранения стабильности оборотов двигателя. После вновь устанавливают нулевые значения на индикаторе и подстроечным резистором R21 добиваются требуемых начальных оборотов двигателя.
Einzelheiten
В качестве диодного моста VD1 можно применить любой с подходящим током на напряжение не менее 100 В. Диодный мост VD2 на ток 0,5…1 А.
В качестве двигателей кроме КПА, КПТ можно использовать самые разнообразные коллекторные двигатели (например, автомобильные от стеклоочистителей) на напряжение 12…48 В, какс постоянными магнитами, так и с независимой обмоткой возбуждения (ОВ). В этом случае ОВ подключается непосредственно к выходу диодного моста VD1. При использовании двигателей на 12 В напряжение на трансформаторе ТР1 может быть уменьшено до 24 В.
Трансформатор ТР1 можно использовать ТПП-321, 322 с типовым выходным напряжением 42 В, либо изготовить самостоятельно с учетом вышеуказанного. В качестве трансформатора ТРЗ вместо МИТ-4 можно использовать практически любой подходящий импульсный трансформатор, предназначенный для управления тиристорами или симисторами.
Отечественный тиристор VS1 допустимо заменить импортным ВТ152 в пластмассовом корпусе, радиатор к нему выбирают исходя из максимальных токов нагрузки.
Резистивный шунт R2 с номинальным сопротивлением 0,1…0,15 Ом мощностью не менее 5 Вт.
Индикаторы HL2-HL3 можно применить любые спаренные с общим анодом. Динамическая головка ВА1 малогабаритная, подходящая по громкости.
Das Programm für den Mikro (Herunterladen)
Autor: Виктор Тушнов, г. Луганск
Источник: Радиоаматор №2, 2015
WordPress database error: [Table './meandr_base/anzpz_usermeta' is marked as crashed and last (automatic?) repair failed]
SELECT user_id, meta_key, meta_value FROM anzpz_usermeta WHERE user_id IN (8054) ORDER BY umeta_id ASC