Блоки управления шаговыми двигателями обычно содержат несколько логических микросхем или микроконтроллер. Однако в тех случаях, когда сложный закон управления двигателем не требуется, а достаточно лишь вращать его вал в одну или другую сторону, отсчитывая число шагов “на глаз”, от сложной логики можно отказаться.
Для ручного управления шаговым двигателем, открывающим и закрывающим теплицу, я применил валкодер. Но не обычный, с двумя группами контактов, замыкающихся и размыкающихся со сдвигом на полшага, а специально изготовленный, имеющий четыре (по числу обмоток двигателя) группы чередующихся контактов, поочерёдно замыкающихся с подвижным контактом при вращении вала, на котором укреплён подвижный контакт. Неподвижные контакты валкодера соединены с обмотками двигателя через электронные ключи, коммутирующие обмотки.
Конструкция самодельного валкодера изображена на рис. 1. На кольцо 4 из изоляционного материала намотана обмотка 3, содержащая 28 витков, четырьмя сложенными вместе лакированными одножильными медными проводами. Размеры кольца 4 и диаметр проводов должны быть подобраны так, чтобы на внутренней поверхности кольца витки плотно, практически без зазоров, легли в один слой, а провода чередовались в порядке 1-2-3-4 без перехлёстов.
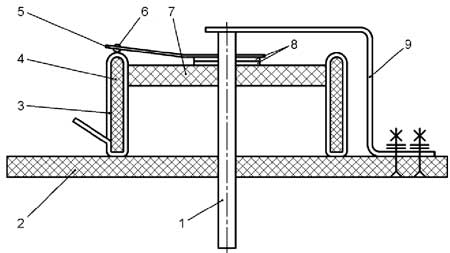
Рис. 1
К верхнему закруглённому срезу кольца 4 провода должны прилегать, по возможности, плотнее, зазоры между ними заливают эпоксидной смолой. Внутрь кольца 4 туго вставлена вырезанная из листового изоляционного материала центрирующая шайба 7 с отверстием для латунного вала 1. Шайбу 7 тоже крепят эпоксидной смолой. Такое же отверстие, как в центрирующей шайбе 7, сверлят в основании 2.
После затвердевания смолы кольцо 4 с обмоткой кладут верхним торцом на лист уложенной на гладкую поверхность мелкозернистой наждачной бумаги и равномерно сошлифовывают провода-контакты и эпоксидные перемычки между ними приблизительно на четверть диаметра провода. Так создают контактную поверхность, по которой скользит стальной шарик 6 подвижного контакта 5. Парасталь-медь обеспечивает надёжный контакт и лёгкое скольжение.
Упругий подвижный контакт 5 с отверстием для шарика 6 припаивают ближе к верхнему концу вала 1. На нижний конец вала 1 надевают две металлические шайбы 8 и пропускают вал через отверстие в центрирующей шайбе 7, затем сквозь кольцо 4 с обмоткой (повёрнутое контактной поверхностью вверх) и, наконец, через отверстие, просверленное в основании 2.
Подбирая оптимальное положение кольца 4 на основании 2, добиваются, чтобы вал 1 легко вращался, а шарик 6 скользил строго по оголённой поверхности контактов, равномерно прижимаясь к ней. В этом положении кольцо 4 фиксируют на основании 2 эпоксидной смолой. Остаётся только устранить осевое перемещение вала 1, прижав его кронштейном 9. Получился валкодер на 112 положений (рис. 2).

Рис. 2
Он будет поочерёдно подключать к источнику питания обмотки униполярного шагового двигателя, который за один оборот вала валкодера станет делать 112 шагов. Направление шагов будет таким же, как у надетой на вал валкодера ручки управления, а их частота будет определяться скоростью её вращения.
На рис. 3 показана принципиальная схема блока управления униполярным шаговым двигателем M1 с помощью описанного валкодера, обозначенного на ней S1. Поскольку в блоке четыре одинаковых электронных ключа, рассмотрим только один из них, собранный на транзисторах VT1 и VT2.

Рис. 3
Предположим, что в момент подачи питания подвижный контакт валкодера не соединён ни с одним из неподвижных контактов группы A. Поэтому транзистор V71 открыт, а конденсатор C1 разряжен. Транзистор VT2 закрыт, ток через включённую в цепь его стока обмотку двигателя M1 не течёт. Светодиод HL1 погашен.
В момент соединения подвижного контакта с неподвижным контактом группы А транзистор VT1 закрывается. Конденсатор C2 начинает заряжаться через резисторы R3 и R4. Вызванное током зарядки падение напряжения на резисторе R4 открывает полевой транзистор УТ2 и удерживает его открытым. Через обмотку двигателя течёт ток, а светодиод HL1 включён, сигнализируя об этом. Но когда конденсатор C2 зарядится до такой степени, что напряжение на резисторе R4 упадёт ниже порога открывания транзистора VT2, он закроется. Это ограничит длительность импульсов тока в обмотке, что необходимо в тех случаях, когда ручку валкодера продолжительное время не вращают или делают это слишком медленно.
Имейте в виду, что отсутствие тока в обмотках двигателя в паузах между шагами экономит электроэнергию и снижает нагрев двигателя и транзисторов в электронных ключах, но ослабляет фиксацию его ротора в статических положениях. Это не имеет большого значения, если надёжная фиксация ротора двигателя в достигнутом положении не требуется или, например, в случаях, когда вращающий момент передают на перемещаемый объект через червячный редуктор.
При размыкании подвижного и неподвижного контактов транзистор W1 открывается. Через него и диод VD1 разряжается конденсатор C2. Если транзистор VT2 был открыт, он закроется и прекратит ток в обмотке двигателя, а светодиод HL1 погаснет.
Диод VD2 предназначен для подавления импульсов напряжения самоиндукции, возникающих на обмотке в моменты прекращения текущего через неё тока. Фильтр R1d необходим для предотвращения самовозбуждения устройства. Оно возможно, поскольку валкодер состоит, по существу, из четырёх катушек индуктивности, связанных между собой как индуктивно, так и через межвитковые ёмкости.
Резисторы R21-R24 ограничивают ток в обмотках двигателя. Их сопротивление придётся подбирать индивидуально для двигателя каждого типа. Возможно, они совсем не потребуются. Светодиоды HL1-HL4 рекомендуется разместить так, чтобы создаваемый ими “бегущий огонь”, перемещаясь, показывал направление вращения ротора шагового двигателя. При несовпадении этих направлений или пропуске шагов нужно проверить порядок подключения обмоток двигателя к выходам электронных ключей.
Я испытывал это устройство с шаговыми двигателями PM42L-EPAO и 103-550-0149 и получил хорошие результаты.
Схема устройства управления биполярным шаговым двигателем сложнее рассмотренной, так как требуется не только переключать обмотки, но и изменять направление текущего через них тока. Она изображена на рис. 4. Входные цепи A-E могут быть подключены как к одноимённым выходам электронных ключей устройства, собранного по схеме рис. 3, так и непосредственно к таким же группам контактов валкодера. Однако в последнем случае не будет ограничения длительности импульсов тока в обмотках двигателя.
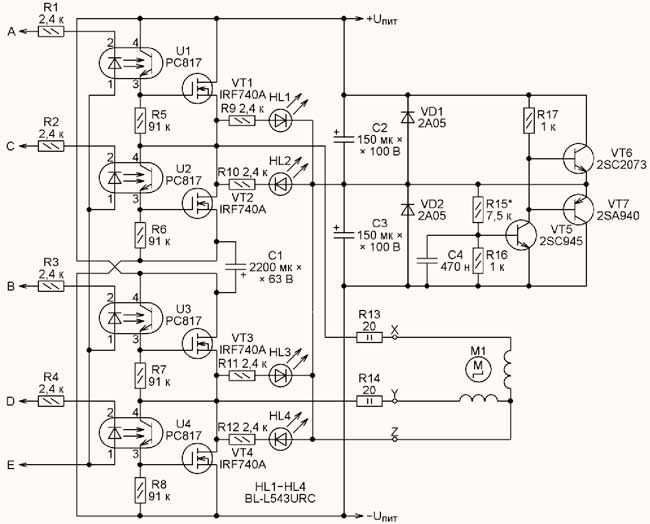
Рис. 4
Общий вывод обмоток двигателя в рассматриваемом случае подключён к искусственной средней точке напряжения питания Uпит, созданной с помощью узла на транзисторах VT5-VT7. Это уменьшило в два раза подаваемое на обмотки двигателя напряжение, но избавило от необходимости применять дополнительные электронные ключи для коммутации вторых выводов каждой обмотки. Напряжение в точке Z, равное половине U^, устанавливают подборкой резистора R15. Учтите, что при изменении напряжения питания подборку резистора придётся повторить.
От узла на транзисторах VT5-VT7 можно отказаться, если применить для питания двигателя двухполярный источник с реальной средней точкой, которую следует соединить с цепью Z.
Устройство было проверено с двигателями 16PU-M002-G1 и M49SP-1. Выяснилось, что при продолжительной работе и токе, потребляемом двигателем, более 0,2 А все мощные транзисторы следует установить на теплоотводы.
В любительских условиях паспортные данные на применяемые шаговые двигатели, как правило, отсутствуют. Нет и данных о назначении их выводов, число которых к тому же бывает разное. Я обычно выхожу из затруднительного положения следующим образом.
Прежде всего, с помощью омметра нахожу выводы каждой из обмоток. Если их две (с общим выводом или без него) – двигатель биполярный. При отсутствии общего вывода создаю его, соединив вместе по одному (любому) выводу каждой обмотки. Чтобы безошибочно оценивать на глаз направление шагов вала двигателя, надеваю на него указатель в виде стрелки. Затем, поочерёдно подключая к общему и к свободному выводу каждой обмотки источник питания в разной полярности, нахожу такую последовательность подключений, при которой вал двигателя без пропусков и сбоев “шагает” в нужном направлении.
Приблизительно такую же процедуру я использую с униполярным двигателем. Он может иметь четыре обмотки с общим пятым выводом или две пары обмоток с отдельным общим выводом каждая (всего шесть выводов). В последнем случае общие провода пар я объединяю в один. Подключая источник питания плюсом к общему проводу всех обмоток, а минусом – поочерёдно к каждой обмотке, определяю их последовательность для шагов в нужном направлении.
Самый сложный случай – двигатель с четырьмя обмотками, имеющими восемь отдельных выводов. Эти обмотки можно соединять по-разному, делая двигатель униполярным или биполярным. Но на поиск правильной последовательности подачи на них напряжения придётся затратить гораздо больше времени, чем в предыдущих случаях.
Автор: С. Долганов, г. Барабинск Новосибирской обл.