

В интернете, в литературе можно найти немало схем различных регуляторов мощности, как аналоговых, так и цифровых. Предлагаемое устройство, собранное на микроконтроллере ATMEL. В двух независимых каналах регулирования мощности устройства применен фазоимпульсный метод управления.
Принципиальная схема двухканального фазового регулятора мощности (далее устройства) приведена на рис. 1, интерфейс управления на рис. 2.

Устройство разработано на базе микроконтроллера фирмы ATMEL АТ89С4051-24PI. Два независимых регулятора мощности (два канала) собраны соответственно на симисторах VS1 и VS2. Регулирование мощности осуществляется фазоимпульсным управлением данных симисторов. Диапазон регулирования выходной мощности каждого канала задается в относительных единицах, от 0 до 99. Конечно, регуляторы с фазоимпульсным управлением создают помехи в питающей сети, но позволяют регулировать мощность (яркость излучения) таких нагрузок, как лампа накаливания. Например, к первому каналу регулятора можно подключить настольную лампу или торшер, второй канал будет регулировать подсветку в аквариуме и т. д.
В интерфейс управления (рис. 2) входит клавиатура (кнопки S1…S4) и блок индикации из трех цифровых семисегментных индикаторах HG1…HG3.

S1 ( Р) — выбор режима работы устройства в замкнутом цикле (“регулятор 1”, “регулятор 2”) после подачи питания устройство сразу переходит в режим “регулятор 1”, каждое нажатие данной кнопки переводит устройство в следующий режим;
S2 (▲) — увеличение значения подключаемой мощности регуляторов в режимах “регулятор 1”, “регулятор 2”, нажатие на данную кнопку увеличивает на единицу индицируемое значение в вышеуказанных режимах;
S3 ( ▼ ) — уменьшение значения выходной мощности регуляторов в режимах “регулятор 1”, “регулятор 2” каждое нажатие на данную кнопку уменьшает на единицу индицируемое значение в вышеуказанных режимах;
S4 (В) — отключение от сети нагрузок подключаемых к соединителям Х2, ХЗ, независимо от текущего значения индицируемого на индикаторах.
В любом режиме работы устройства, каждая кнопка выполняет только одну предназначаемую ей функцию.
Разряды индикации интерфейса имеют следующее назначение (справа налево по рис. 2).
1 разряд (индикатор HG3) отображает младший разряд задаваемого значения подключаемой мощности регуляторов в режимах “регулятор 1” и “регулятор 2”;
2 разряд (индикатор HG2) отображает старший разряд задаваемого значения подключаемой мощности регуляторов в режимах “регулятор 1” и “регулятор 2”;
3 разряд (индикатор HG1) отображает текущий режим работы устройства, если устройство работает в режиме “регулятор 1й — “2”; регулятор 2” — “3й.
После подачи питания устройство переходит в режим “ регулятор 1 ” (на индикаторе HG1 индицируется “1”).
Для задания нужного значения в каком -либо канале необходимо кнопкой S1 (Р) выбрать канал регулирования и кнопками S2 (▲), S3 ( ▼) установить требуемое значение. При нажатии на кнопку S4 (В) нагрузки подключенные к устройству отключаются от сети. При этом на выводах 8 и 9 микроконтроллера DD1 устанавливается сигнал уровня лог. 1. На индикаторах HG2, HG3 индицируются нули во всех режимах.
Рассмотрим основные, функциональные узлы принципиальной схемы.
Основой устройства служит микроконтроллер D1, рабочая частота которого задается генератором с внешним резонатором ZQ1 на 10 МГц.
На микросхеме DA1 собран датчик сетевого напряжения. Он отслеживает моменты перехода сетевого напряжения через нуль.
Выходное напряжение датчика с резистора R1 поступает на вывод 7 микроконтроллера. Канал регулирования мощности № 1 собран на симисторе VS1 и оптроне DA2. Канал управляется с вывода 8 микроконтроллера DD1. Нагрузка подключается к соединителю Х2. Канал регулирования мощности № 2 собран на симисторе VS2 и оптроне DA3. Канал управляется с вывода 9 микроконтроллера. Нагрузка подключается к соединителю ХЗ. Для уменьшения уровня помех, создаваемых регуляторами, они включены в сеть через сетевые фильтры А1 и А2.
Динамическая индикация собрана на микросхемах DD1, DD2; транзисторах VT1…VT3; цифровых семисегментных индикаторах HG1…HG3. Резисторы R10…R16 ограничивают ток через светодиоды индикаторов.
Цифровая часть принципиальной схемы устройства гальванически развязана от сети.
Программное обеспечение микроконтроллера обеспечивает реализацию фазоимпульсного управления симисторного регулятора мощности. В цикле, в подпрограмме обработки прерывания таймера TF0 через каждые 80 мкс микроконтроллер опрашивает состояние вывода 7. Прерывания от таймера TF0 обеспечивают функционирование динамической индикации, а так же работу клавиатуры.
Назовем условно байт, который микроконтроллер периодически записывает в порт Р1 — байтом индикации. Младшая тетрада байта индикации поступает на вход дешифратора D7 и определяет значение разряда. Биты старшей тетрады через транзисторы VT1…VT3 управляют индикаторами HG1…HG3, в динамической индикации. Лог. 0 на выводе 17 микроконтроллера открывает транзистор VT1 и включает индикатор HG1 и т. д. Младшая тетрада представляет собой двоично-кодированное десятичное число и через дешифратор DD2 управляет сегментами индикаторов HG1…HG3. При работе с подпрограммной опроса состояния клавиатуры, микроконтроллер опрашивает состояние своего входа INTO (вывод 6 микроконтроллера DD1). При любой нажатой кнопке S1…S4 на входе INTO, с включением этих индикаторов, присутствует низкий уровень. Таким образом, каждая кнопка клавиатуры “привязана” к “своему” биту в старшей тетраде байта индикации.
Алгоритм работы программы фазоимпульсного регулятора рассмотрим на примере канала № 1. Осциллограммы, поясняющие работу фазового регулятора, на рис 3.
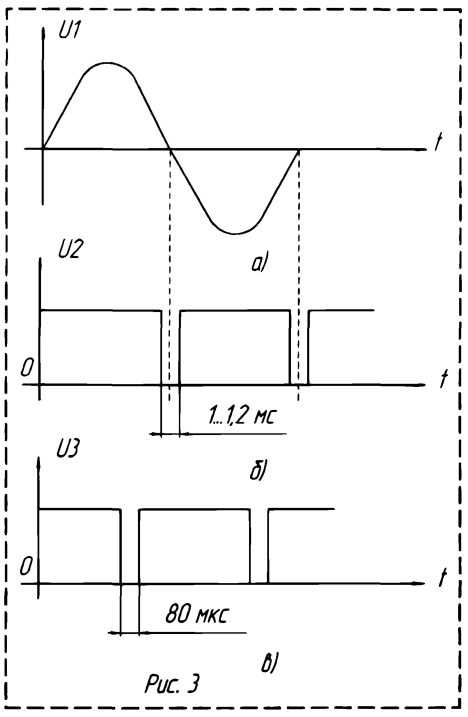
В каждом полупериоде сетевого напряжения (рис. За) микроконтроллер запускающим импульсом с вывода 8 длительностью 80 мкс (рис. Зв) включает симистор VS1 через оптрон DA1. Значение мощности в нагрузке подключенной к соединителю Х2 зависит от того, как долго симистор будет включен в течение каждого полупериода сетевого напряжения.
Для того чтобы значение подключаемой мощности в нагрузке увеличивалось с увеличением значения задаваемой мощности на индикаторе устройства, а так же для получения дискретности регулирования 1 %, необходимо, чтобы импульс включения симистора, смещался с шагом 100 мкс, с момента прохождения сетевого напряжения через нуль, справа налево по рис 36, при увеличении на единицу значения задаваемой мощности на индикаторе устройства.
Запускающий импульс подается с некоторой задержкой с момента прохождения сетевого напряжения через “нуль». Моменту перехода соответствует лог. 0 на выводе 7 микроконтроллера (рис. 3б). Время задержки определятся числом на индикаторе устройства в режиме “регулятор 1”, которое может принимать значение от 0 до 99. Подпрограмма преобразует данное двухразрядное двоично-десятичное число в однобайтовое двоичное. Это число загружается в счетчик (регистр R7), который реализует временную задержку. Как уже упоминалось выше, микроконтроллер опрашивает каждые 80 мкс выход датчика сети. В момент прохождения сетевого напряжения через нуль и происходит запуск счетчика. При изменении кнопкой индицируемого на индикаторе числа, в режиме “регулятор 1” изменяется время задержки включения управляющего импульса на включения симистора VS1. То есть меняется момент включения симистора в каждом полупериоде сетевого напряжения и эффективное напряжение на нагрузке, подключенной к соединителю Х2. Аналогичным образом работает канала регулирования мощности № 2, регулирующий мощность в нагрузке, подключенной к соединителю ХЗ устройства.
Угол регулирования симистора в зависимости от тока нагрузки будет неодинаковый. Например, реально в устройстве, диапазон регулирования лампочки накаливания мощностью 100 Вт по индикатору составляет от 18 до 97. То есть можно задать 79 уровней яркости светового излучения. Это необходимо в тех случаях, когда лампа накаливания используются в качестве нагревательного элемента.
Коротко о программе. В памяти данных микро-контроллера с адреса 35Н по ЗСН организован буфер отображения для динамической индикации. Младшая тетрада каждого байта, в буфере отображения, представляет собой двоично-кодированное десятичное число, которое определяет значение разряда, а старшая тетрада определяет номер разряда в динамической индикации. Таким образом, в каждом байте буфера определено значение числа и его место при выводе на индикацию. По своему функциональному назначению в зависимости от режима работы устройства, адресное пространство буфера разбито на две функциональные группы.
35Н…38Н — адреса, где хранится буфер отображения для канала регулирования мощности № 1. Эти адреса выводятся на индикацию в режиме “регулятор 1”.
Ниже приведено функциональное назначение каждой ячейки буфера.
35Н — адрес, где хранится младший разряд задаваемого значения, содержимое данного адреса индицируется на индикаторе HG3.
36Н — адрес, где хранится старший разряд задаваемого значения, содержимое данного адреса индицируется на индикаторе HG2.
37Н — адрес, где хранится цифра ”1”, содержимое данного адреса индицируется на индикаторе HG1.
38Н — адрес пустой ячейки. Данный адрес, в буфере отображения, необходим, для функционирования кнопки S1.
39H…3CH — адреса, где хранится буфер отображения для канала регулирования мощности № 2. Эти адреса выводятся на индикацию в режиме “регулятор 2”.
Каждый байт из функциональной группы в цикле, в подпрограмме обработки прерывания таймера TF0 выводится в порт Р1 микроконтроллера DD1. Старшая тетрада байта индикации представляет собой код «бегущий ноль”. Таким образом, записывая поочередно, в цикле, в порт Р1 байты из функциональной группы буфера, мы получаем режим динамической индикации. После записи байта индикации в порт Р1, начинается опрос клавиатуры. Нажатием кнопки S1 сдвигается влево единица в регистре R2, и тем самым задается один из вышеуказанных пяти режимов работ. В регистр R0 записывается первый адрес функциональных групп. В подпрограмме обработки прерывания регистр R0 инкрементируется.
В основной программе происходит, перевод двухразрядного двоично-десятичного числа (значение уровня задаваемой мощности на индикаторе устройства) в режимах “регулятор 1 ” и «регулятор 2” в однобайтовое двоичное, для реализации алгоритма фазоимпульсного управления.
Разработанная программа на ассемблере занимает порядка 0,2 КБайт памяти программ микроконтроллера.
Устройство монтируют на отдельной макетной плате с размерами 120×80 мм. При монтаже лучше разделить цифровую часть схемы от сетевой.
В устройстве использованы резисторы С2-ЗЗН-0.125, подойдут любые другие с такой же мощностью рассеивания и погрешностью 5 %. Конденсаторы С1, СЗ К50-35. Конденсатор С2 — К10-17. Он устанавливается между цепью +5V микроконтроллера DD1 и общим проводником.
В индикаторе устройства целесообразно выделить разряд, индицирующий текущий режим работы устройства (индикатор HG1) на фоне остальных разрядов. Поэтому для данного разряда выбран семисегментный индикатор красного цвета HDSP-F001, (подойдет HDSP-F151) индикаторы HG2, HG3 зеленого цвета HDSP-F501. Подойдут любые, другие индикаторы с общим анодом и приемлемой яркостью свечения. Ток через сегмент индикатора определяется нагрузочной способностью дешифратора DD2. Для КР514ИД2 максимально допустимый ток ка>кдого выхода 22 мА. Элементы R9 и С1 при подаче напряжения питания +5V осуществляют системный аппаратный сброс микроконтроллера DD1.
Ток через каэдый канал регулирования мощности ограничен предельно допустимым током 7,5А через сетевой фильтры МРМ4-С7,5АМУ. Более подробную информацию о данном фильтре можно найти в [5]. При небольших нагрузках, а так же если требования по уровню помех не очень высокие, то сетевые фильтры можно исключить из схемы. Нагрузки подключаются к устройству через соединители (вилки) Х2, Х5 типа MPW-2 (ответная часть — розетки MHU-2). Данные соединители, можно заменить на клеммники ТВ-10-02. Сетевое напряжение поступает на устройство через соединитель Х1 типа MPW-2. Питающее напряжение +5В поступают на плату устройства через соединитель Х4 типа WF-2 (ответная часть розетка HU-2).
Если номинальная мощность нагрузки в канале регулирования превышает 100 Вт, то симистор лучше установить на соответствующий теплоотвод. Симистор TIC236M, допустимый ток которого 12 А, позволяет управлять нагрузкой до 1,5 кВт. Вместо данного симистора можно применит отечественный КУ208Г. Однако он обладает значительно худшей чувствительностью. Для надежного срабатывания через управляющий электрод симистора КУ208Г должен протекать ток не менее 250 мА. Потому сопротивления R4 и R5 необходимо уменьшить до значения 100 Ом. Для нагрузок мощностью до 2 кВт можно использовать симисторы с допустимым током до 16 А, например TIC246N. Целесообразно измерить реальные значения тока управления и удержания применяемых симисторов, чтобы оценить пригодность симистора к конкретной, особенно маломощной нагрузке. Несложная методика отбора, а так же схема приведены в [4].
В устройстве нет никаких настроек и регулировок, если монтаж выполнен правильно, то оно начинает работать сразу после подачи на него напряжения питания. При проверке каналов регулирования мощности, первое включение лучше сделать при небольшой нагрузке в каждом канале регулирования мощности, например, с лампой накаливания мощностью 20…30 Вт. Целесообразно сначала проверить канал регулирования мощности № 1, а затем № 2. Для этого необходимо войти в режим “регулятор 1” и изменяя с клавиатуры уровень подключаемой мощности на индикаторе проконтролировать изменение яркости излучения лампы. Если лампа вообще не включилась, то нужно проконтролировать сигнал с датчика сети (вывод 7 микроконтроллера DD1) -импульсы уровня лог. 0 длительностью 1 …1,2 мс и периодом 10 мс (рис. 3б).
Файлы для прошивки микроконтроллера
Автор: Шишкин С. Источник: Радиоконструктор № 03 2012 г.