

Практически любое микроконтроллерное устройство имеет те или иные устройства индикации. В простейшем случае это всего несколько светодиодов, а порой это цветной графический дисплей. Появление модулей ЖКИ со встроенными контроллерами значительно упростило схемы сопряжения. Наиболее универсальными из таких модулей являются матричные алфавитно-цифровые, которые позволяют отображать цифры, буквы латинского и русского алфавита и даже псевдографику, используя возможности загружаемых символов. Однако такие модули довольно дороги, они не отличаются малым энергопотреблением, да и в ряде устройств просто избыточны. Там, где не требуются широкие возможности устройств индикации, более подходящими могут оказаться 7-сегментные ЖКИ-модули.
Среди 7-сегментных ЖКИ-модулей наибольшее распространение получили модули на основе контроллера HT1611 (или HT1613). Они имеют 10 знакомест и управляются по последовательной шине.

10-разрядный ЖКИ – модуль на основе контроллера HT1611.
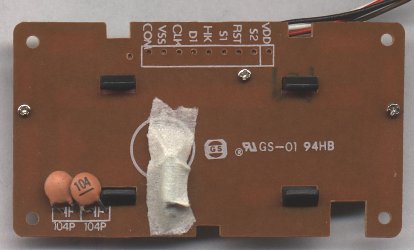
Под липкой бумажной лентой расположен кварцевый резонатор.
Назначение выводов модуля показано в таблице:
| Номер вывода | Название вывода | Функция |
| 1 | 12/24 | переключение формата времени |
| 2 | Vss | общий |
| 3 | SK | тактовая линия шины |
| 4 | DI | линия данных шины |
| 5 | HK | переключение часы/индикатор |
| 6 | S1 | установка времени |
| 7 | S2 | выбор режима установки времени |
| 8 | TMR | сброс таймера |
| 9 | Vdd | напряжение питания |
Примечание: выводы 1, 6, 7, 8 имеют внутреннее подключение к общему проводу через резисторы примерно 5 М. Выводы 3, 4, 5 имеют внутреннее подключение к выводу питания через резисторы примерно 1 М.
Режимом работы модуля управляет сигнал HK, который в телефонном аппарате соответствует сигналу поднятия трубки. Когда HK=1, модуль находится в режиме отображения реального времени. Если установить HK=0, то модуль переходит в режим таймера, начиная отсчет с нуля. Максимальный интервал, отсчитываемый таймером – 59 мин. 59 сек. Если в режиме таймера по шине приходят символы, индикатор очищается, и они начинают отображаться с крайней правой позиции. Новый поступивший символ вызывает сдвиг имеющихся символов влево. Если более 10 сек новые символы не поступают, модуль снова переходит в режим таймера, начиная отсчет с нуля. Если во время отображения поступивших по шине символов установить HK=1, то модуль вернется в режим отображения реального времени. Если же установить HK=1 во время индикации значения таймера, то возврат в режим отображения реального времени произойдет с задержкой 5 сек.
К выводу TMR может быть подключена кнопка сброса таймера. Когда модуль находится в режиме индикации значения таймера, первое нажатие этой кнопки сбрасывает таймер, и отсчет начинается с нуля. Повторное нажатие останавливает таймер (режим удержания показаний). Следующее нажатие снова запустит таймер с нулевого значения.

Все кнопки подключаются между соответствующими выводами модуля и выводом питания.
Действие кнопки TMR в режиме индикации реального времени.

Временная диаграмма передачи данных.
Каждый символ кодируется 4-мя битами, поэтому всего имеется 16 символов.

Таблица знакогенератора.

Различные схемы питания индикатора.
Для согласования логических уровней можно применить разные схемы. Учитывая тот факт, что входы DI и SK имеют внутренние подтягивающие резисторы, можно обойтись просто диодами (рисунок a). Преимущество такого способа заключается в том, что согласование не будет зависеть от напряжения питания микроконтроллера. Однако такой способ имеет и недостаток. Ввиду больших номиналов подтягивающих резисторов уровни на входах будут довольно медленно достигать состояния логической единицы, что потребует значительного снижения скорости обмена. Поэтому предпочтительнее для согласования использовать резисторные делители (рисунок b).
Согласование логических уровней.
;Определение регистров:
.def temp =r16 ;временный регистр temp
.def Cnt =r17 ;временный регистр Cnt
.def Del =r18 ;временный регистр Del
;Определение портов:
.equ DIRD = 0b00000011 ;направление для порта D
.equ PUPD = 0b01111100 ;pull-ups для порта D
.equ SD = PD0 ;линия данных DI
.equ SC = PD1 ;тактовая линия SK
;Инициализация:
INIT: ldi temp,RAMEND ;инициализация стека
out SPL,temp
ldi temp,PUPD
out PORTD,temp ;инициализация порта D
ldi temp,DIRD
out DDRD,temp ;задание направления порта D
;Основная программа:
ldi temp,3
rcall LCD ;вывод на индикатор числа 3
......... ;продолжение программы
;Подпрограмма вывода символа на индикатор:
;код символа должен находиться в регистре temp
LCD: ldi Cnt,4 ;загрузка счетчика
swap temp ;подготовка мл. тетрады к сдвигу
LDL: rol temp ;сдвиг
brcs LD1
LD0: cbi PORTD,SD ;сброс линии данных, если бит=0
rjmp STR
LD1: sbi PORTD,SD ;установка линии данных, если бит=1
STR: sbi PORTD,SC ;установка линии тактирования
ldi Del,5
HNG1: dec Del ;задержка на установку данных
brne HNG1
cbi PORTD,SC ;сброс линии тактирования
ldi Del,10
HNG2: dec Del ;задержка на удержание данных
brne HNG2
dec Cnt
brne LDL ;цикл, если не последний бит
ldi Del,25
HNG3: dec Del ;межсимвольная задержка
brne HNG3
ret
Необходимо отметить, что в течение примерно 2 сек после включения питания модуль не воспринимает данные, передаваемые ему по последовательной шине. Поэтому всегда должна быть задержка между включением питания и началом обмена.
Описанный модуль, тем не менее, обладает рядом существенных недостатков:
- отсутствие децимальных точек; это затрудняет отображение произвольных цифровых величин
- невозможность управления отдельными сегментами; контроллер имеет фиксированный знакогенератор, содержащий всего 16 символов, в то же время возможности 7-сегментного индикатора значительно шире, он может отображать многие буквы латинского алфавита и специальные символы
- заметные мерцания изображения при загрузке, вызванные отсутствием буферизации выводимой информации; при необходимости обновления изображения с большой частотой создается весьма неприятный зрительный эффект
- высокая инерционность, что ограничивает применение таких эффектов, как, например, мигающие символы
- плохой угол обзора; индикатор оптимизирован для применения в телефонных аппаратах, где он устанавливается на слегка наклонной панели; при установке индикатора, например, на вертикальную переднюю панель прибора контрастность изображения резко падает
- отсутствие возможности регулировки контрастности; такую регулировку можно осуществить только изменением напряжения питания, что не всегда удобно
- отсутствие встроенной подсветки; место для ее установки не предусмотрено
- требуются дополнительные элементы для получения напряжение питания 1.5 В и для согласования логических уровней, так как напряжение питания микропроцессорной системы обычно выше.
Другим распространенным типом 7-сементного ЖКИ – модуля со встроенным контроллером является модуль МТ10Т7-7 производства компании «МЭЛТ».

В то же время некоторые недостатки модуль все же имеет. Один из них – это угол обзора. Этот модуль также оптимизирован для установки на слегка наклонную (почти горизонтальную) панель, что хорошо для телефонного аппарата, но не подходит, например, для измерительного прибора с вертикальной передней панелью. Вообще, при производстве индикатора оптимальный угол зрения может быть сделан любым. В номенклатуре ЖКИ зарубежных фирм почти для любого типа индикатора имеются разные версии, оптимизированные для разных углов зрения. У МТ10Т7 таких версий нет, и это можно объяснить тем, что основным потребителем таких индикаторов являются изготовители телефонных аппаратов с АОН, под чьи нужды и оптимизирован индикатор.
Второй недостаток модуля МТ10Т7 заключается в том, что он имеет параллельную шину управления. Шина содержит 4 разряда данных, 1 разряд адреса и 2 сигнала стробирования. При подключении к микроконтроллеру индикатор требует как минимум 6 линий вывода (модуль на основе HT1611 требует всего 2 линии). Учитывая тот факт, что высокого быстродействия при обмене с индикатором обычно не требуется, параллельную шину нельзя назвать оптимальной.
Простая доработка позволяет оснастить указанный модуль последовательной шиной управления. Описание самого модуля здесь приводить нет смысла, так как имеется довольно хороший pdf (mt-10t7-7.pdf). Поэтому будет рассмотрена только доработка.
Самым универсальным способом преобразования последовательного формата в параллельный является использование сдвигового регистра с буфером хранения, например, 74HC595. Схема подключения такого сдвигового регистра к модулю показана на рисунке. При этом модуль приобретает шину, совместимую с SPI.
CLK .EQU P1.0 ;линия clock
LOAD .EQU P1.1 ;линия load
DATA .EQU P1.2 ;линия data
;Основная программа:
MAIN: LCALL CLEAR ;очистка индикатора
MOV A,#00H
LCALL WR_A ;загрузка адреса первого знакоместа
MOV A,#3
LCALL WR_S ;отображение числа 3
.......... ;продолжение программы
;Подпрограммы:
;Очистка индикатора:
CLEAR: MOV A,#0FH ;адрес регистра BLK
LCALL WR_A ;запись адреса
MOV A,#0FH ;код разрешения шины
LCALL WR_N ;запись тетрады
MOV A,#00H ;адрес знакоместа SG1
LCALL WR_A ;запись адреса
MOV R0,#10 ;загрузка счетчика
CL1: CLR A
LCALL WR_D ;очистка знакомест SG1 - SG10
DJNZ R0,CL1
RET
;Вывод символа на индикатор:
;A – код символа (ACC.7 - точка)
WR_S: MOV DPTR,#FONT ;загрузка адреса начала знакогенератора
MOV C,ACC.7 ;сохранение признака точки
CLR ACC.7
MOVC A,@A+DPTR ;перекодировка
MOV H,C ;восстановление признака точки
LCALL WR_D ;запись данных
RET
;Запись байта данных:
;A – байт данных
WR_D: PUSH ACC ;сохранение байта данных
LCALL WR_N ;запись младшей тетрады
POP ACC ;восстановление байта данных
SWAP A ;обмен тетрадами
LCALL WR_N ;запись старшей тетрады
RET
;Запись тетрады:
;A - тетрада (00H..0FH)
WR_N: RL A
ANL A,#1EH
ORL A,#80H ;A=1, WR=0
PUSH ACC
ORL A,#20H ;A=1, WR=1
LCALL WR595 ;загрузка регистра 74HC595
POP ACC
LCALL WR595 ;загрузка регистра 74HC595
RET
;Запись адреса:
;A - адрес (00H..0FH)
WR_A: RL A
ANL A,#1EH ;A=0, WR=0
PUSH ACC
ORL A,#20H ;A=0, WR=1
LCALL WR595 ;загрузка регистра 74HC595
POP ACC
LCALL WR595 ;загрузка регистра 74HC595
RET
;Загрузка регистра 74HC595:
;A - данные
WR595: PUSH B
MOV B,#8 ;загрузка счетчика
CLR LOAD ;LOAD=0
WR1: CLR CLK ;CLK=0
RLC A ;сдвиг бита данных в C
MOV DATA,C
SETB CLK ;CLK=1
DJNZ B,WR1
SETB LOAD ;LOAD=1
POP B
RET
;Таблица знакогенератора:
; FCBHADEG
FONT .DB 11101110B ;code 00H, character 0
.DB 01100000B ;code 01H, character 1
.DB 00101111B ;code 02H, character 2
.DB 01101101B ;code 03H, character 3
.DB 11100001B ;code 04H, character 4
.DB 11001101B ;code 05H, character 5
.DB 11001111B ;code 06H, character 6
.DB 01101000B ;code 07H, character 7
.DB 11101111B ;code 08H, character 8
.DB 11101101B ;code 09H, character 9
.DB 11101011B ;code 0AH, character A
.DB 11000111B ;code 0BH, character b
.DB 10001110B ;code 0CH, character C
.DB 01100111B ;code 0DH, character d
.DB 10001111B ;code 0EH, character E
.DB 10001011B ;code 0FH, character F
.DB 00000000B ;code 10H, character blank
.DB 00000100B ;code 11H, character _
.DB 00000001B ;code 12H, character -
.DB 00001000B ;code 13H, character ~
.DB 10101001B ;code 14H, character degree
.DB 00000111B ;code 15H, character c
.DB 11001110B ;code 16H, character G
.DB 11100011B ;code 17H, character H
.DB 01100000B ;code 18H, character I
.DB 10000110B ;code 19H, character L
.DB 00000110B ;code 1AH, character l
.DB 01000011B ;code 1BH, character n
.DB 01000111B ;code 1CH, character o
.DB 10101011B ;code 1DH, character P
.DB 10001010B ;code 1EH, character R
.DB 00000011B ;code 1FH, character r
.DB 10000111B ;code 20H, character t
.DB 11100110B ;code 21H, character U
.DB 01000110B ;code 22H, character u
.DB 11100101B ;code 23H, character Y
H .EQU ACC.4 ;точка
Еще удобнее применить обычный сдвиговый регистр, не имеющий регистра-защелки. Например, 74HC164 (или 74HC4094 с учетом разницы в разводке). При этом стробирование осуществляется сигналом WR индикатора. Нужно учесть тот факт, что входы WR индикатора являются потенциальными, это означает, что во время загрузки сдвигового регистра на них нужно удерживать пассивный уровень. И только после того, как загрузка завершена, нужно сформировать на этих входах сигнал стробирования. Поскольку в этом варианте схемы у сдвигового регистра используется только 5 выходов, нет необходимости вдвигать все 8 бит. Все это увеличивает скорость загрузки по сравнению с предыдущим вариантом в 3 раза.

Схема второго варианта подключения сдвигового регистра к модулю МТ10Т7.
;A - тетрада (00H..0FH)
WR_N: ANL A,#0FH
ORL A,#10H ;подготовка 5 битов с A=1
SWAP A
RR A
LCALL WR_5 ;загрузка регистра 74HC164
RET
;Запись адреса:
;A - адрес (00H..0FH)
WR_A: ANL A,#0FH
SWAP A ;подготовка 5 битов с A=0
RR A
LCALL WR_5 ;загрузка регистра 74HC164
RET
;Загрузка 5 бит в регистр 74HC164 и
;защелкивание данных в модуле:
;A - данные
WR_5: PUSH B
MOV B,#5 ;загрузка счетчика
WR_B: CLR CLK ;CLK=0
RLC A ;сдвиг бита данных в C
MOV DATA,C
SETB CLK ;CLK=1
DJNZ B,WR_B
CLR LOAD ;LOAD=0
SETB DATA ;DATA=1
SETB LOAD ;LOAD=1
POP B
RET
Ниже приведен аналогичный набор подпрограмм работы с модулем для микроконтроллеров семейства AVR:
.def temp =r16 ;временный регистр temp
.def Cnt =r17 ;временный регистр Cnt
.def Del =r18 ;временный регистр Del
;Определение портов:
.equ DIRB = 0b00000111 ;направление для порта B
.equ PUPB = 0b11111111 ;pull-ups для порта B
.equ DATA =PB0 ;линия data
.equ LOAD =PB1 ;линия load
.equ CLK =PB2 ;линия clock
;Инициализация:
INIT: ldi temp,RAMEND ;инициализация стека
out SPL,temp
ldi temp,PUPB
out PORTB,temp ;инициализация порта B
ldi temp,DIRB
out DDRB,temp ;задание направления порта B
;Основная программа:
rcall LCD_CL ;очистка индикатора
ldi temp,0x00
rcall LCD_WA ; загрузка адреса первого знакоместа
ldi temp,3
rcall LCD_WS ;отображение числа 3
.......... ;продолжение программы
;Подпрограммы:
;Очистка индикатора:
LCD_CL: ldi temp,0x0F ;загрузка адреса регистра BLK
rcall LCD_WA ;запись адреса
ldi temp,0x0F ;код разрешения шины 0x0F
rcall LCD_WN ;запись тетрады
ldi temp,0x00 ;адрес первого знакоместа SG1
rcall LCD_WA ;запись адреса
ldi Del,10 ;загрузка счетчика
cl1: clr temp
rcall LCD_WD ;очистка индикатора
dec Del
brne cl1
ret
;Вывод символа на индикатор:
;temp – код символа (temp.7 – точка)
LCD_WS: bst temp,7 ;сохранение признака точки в T
andi temp,0x7F ;temp.7 <- 0
ldi ZL,low (FONT*2) ;начало таблицы знакогенератора
ldi ZH,high(FONT*2)
add ZL,temp ;добавить смещение (Z + temp)
brcc wc1
inc ZH
wc1: lpm ;чтение таблицы в temp0
mov temp,temp0
bld temp,H ;восстановление признака точки
rcall LCD_WD ;запись данных
ret
;Запись данных:
LCD_WD: push temp ;сохранение данных
rcall LCD_WN ;запись младшей тетрады
pop temp ;восстановление данных
swap temp ;обмен тетрад
rcall LCD_WN ;запись старшей тетрады
ret
;Запись тетрады:
LCD_WN: andi temp,0x0F ;обнуление неиспользуемых битов
ori temp,0x10 ;A=1
rjmp wa1
;Запись адреса:
LCD_WA: andi temp,0x0F ; обнуление неиспользуемых битов
wa1: lsl temp
lsl temp
lsl temp
ldi Cnt,5 ;загрузка счетчика
w5: cbi PORTB,CLK ;CLK=0
rol temp
brcs w51
w50: cbi PORTB,DATA ;DATA=0 или
rjmp w52
w51: sbi PORTB,DATA ;DATA=1
w52: dec Cnt
sbi PORTB,CLK ;CLK=1
brne w5
cbi PORTB,LOAD ;LOAD=0
sbi PORTB,DATA
sbi PORTB,LOAD ;LOAD=1
ret
;Таблица знакогенератора:
FONT: ;FCBHADEG FCBHADEG
.DB 0b11101110, 0b01100000 ;0, 1
.DB 0b00101111, 0b01101101 ;2, 3
.DB 0b11100001, 0b11001101 ;4, 5
.DB 0b11001111, 0b01101000 ;6, 7
.DB 0b11101111, 0b11101101 ;8, 9
.DB 0b11101011, 0b11000111 ;A, b
.DB 0b10001110, 0b01100111 ;C, d
.DB 0b10001111, 0b10001011 ;E, F
.DB 0b00000000, 0b00000100 ;blank, _
.DB 0b00000001, 0b00001000 ;-, ~
.DB 0b10101001, 0b00000111 ;degree, c
.DB 0b11001110, 0b11100011 ;G, H
.DB 0b01100000, 0b10000110 ;I, L
.DB 0b00000110, 0b01000011 ;l, n
.DB 0b01000111, 0b10101011 ;o, P
.DB 0b10001010, 0b00000011 ;R, r
.DB 0b10000111, 0b11100110 ;t, U
.DB 0b01000110, 0b11100101 ;u, Y
.equ H =4 ;точка
Конструктивно сдвиговый регистр располагается на небольшой односторонней печатной плате, которая закрепляется с обратной стороны индикатора. Поскольку там все равно имеются ушки крепления металлической рамки, установка дополнительной платы не увеличивает габаритов модуля.

Установка сдвигового регистра на плату модуля.
Пример подключения клавиатуры.
.equ RETL =PINB4 ;keyboard return line
;Скан-коды кнопок:
.equ K_NO =0x00 ;нет нажатия
.equ K_SL =0x01 ;скан-код кнопки SELECT
.equ K_DN =0x02 ;скан-код кнопки DOWN
.equ K_UP =0x04 ;скан-код кнопки UP
.equ K_EN =0x08 ;скан-код кнопки ENTER
;Сканирование клавиатуры:
;temp – выходной скан-код
SCAN: ldi temp,0xF7 ;инициализация переменной temp
ldi Cnt,8 ;счетчик циклов сканирования
sc1: cbi PORTB,CLK ;CLK=0
rol temp ;C <- temp.7..temp.0 <- C
brcs sc11
sc10: cbi PORTB,DATA ;DATA=0 или
rjmp sc2
sc11: sbi PORTB,DATA ;DATA=1
sc2: dec Cnt
sbi PORTB,CLK ;CLK=1
sec
sbis PINB,RETL ;C <- RETL
clc
brne sc1 ;цикл, если сканирование не завершено
rol temp ;temp.0 <- C, последний бит скан-кода
com temp ;инвертирование temp
andi temp,0x0F ;temp = скан-код
ret
Несмотря на то, что на выходе получается 4-х разрядный скан-код, циклов сканирования 8. Первые 4 цикла подготавливают сдвиговый регистр, записывая в него единицы. Затем осуществляется сканирование «бегущим нулем». На выходе скан-код инвертируется, чтобы нажатие кнопки давало единицу в соответствующем разряде.
Необходимо отметить, что подпрограмма сканирования не производит операцию подавления дребезга. Для подавления дребезга нужно убедится, что в течение 20 – 30 мс состояние кнопки не изменилось. Только после этого скан-код можно считать действительным. Такое время на обработку нажатий клавиатуры, когда никакие другие процессы выполняться не могут, в некоторых системах может оказаться недопустимо большим. В таких случаях процесс подавления дребезга нужно оформить как одну из задач многозадачного ядра. Естественно, привести текст такой обработки для общего случая невозможно.